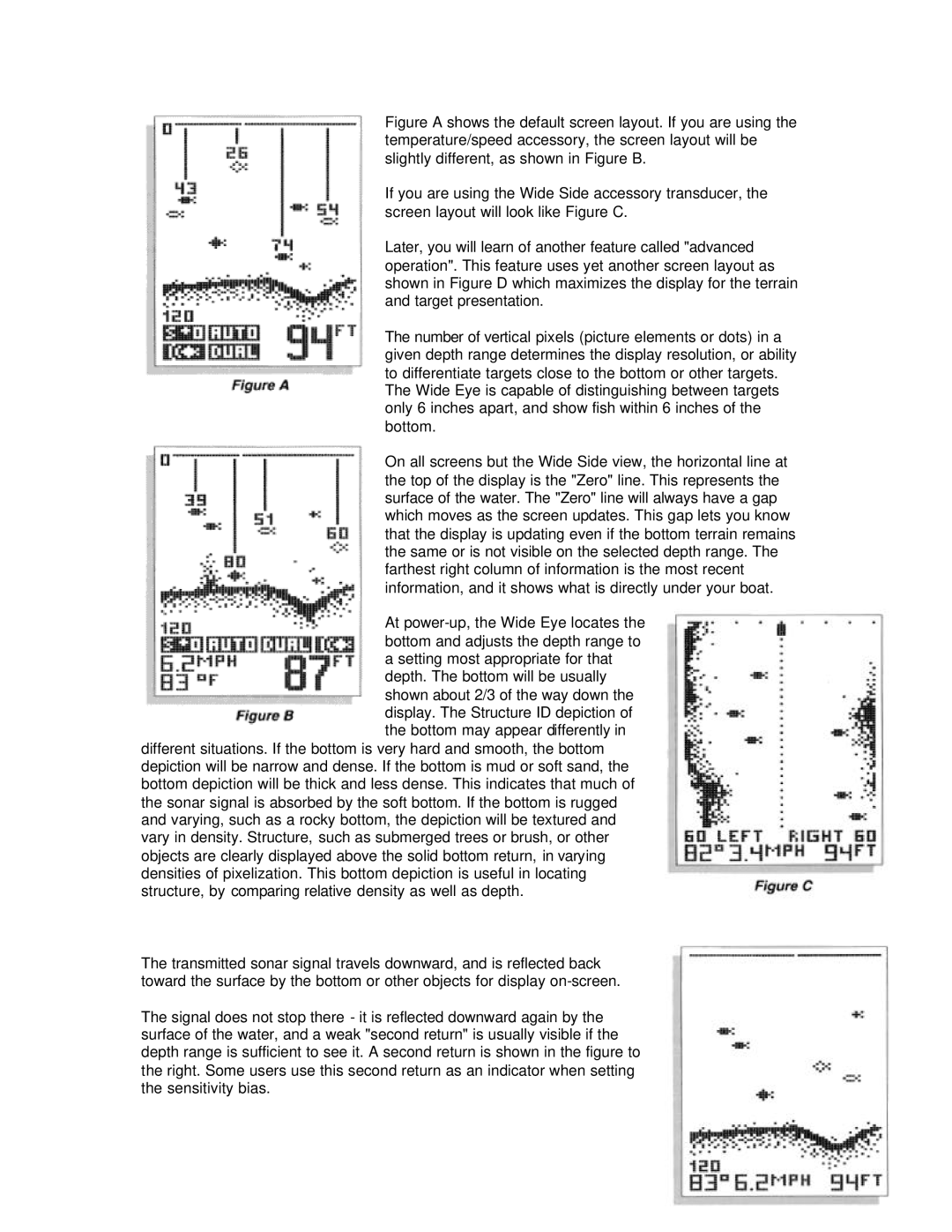
Figure A shows the default screen layout. If you are using the temperature/speed accessory, the screen layout will be slightly different, as shown in Figure B.
If you are using the Wide Side accessory transducer, the screen layout will look like Figure C.
Later, you will learn of another feature called "advanced operation". This feature uses yet another screen layout as shown in Figure D which maximizes the display for the terrain and target presentation.
The number of vertical pixels (picture elements or dots) in a given depth range determines the display resolution, or ability to differentiate targets close to the bottom or other targets. The Wide Eye is capable of distinguishing between targets only 6 inches apart, and show fish within 6 inches of the bottom.
On all screens but the Wide Side view, the horizontal line at the top of the display is the "Zero" line. This represents the surface of the water. The "Zero" line will always have a gap which moves as the screen updates. This gap lets you know that the display is updating even if the bottom terrain remains the same or is not visible on the selected depth range. The farthest right column of information is the most recent information, and it shows what is directly under your boat.
At power-up, the Wide Eye locates the bottom and adjusts the depth range to a setting most appropriate for that depth. The bottom will be usually shown about 2/3 of the way down the display. The Structure ID depiction of the bottom may appear differently in
different situations. If the bottom is very hard and smooth, the bottom depiction will be narrow and dense. If the bottom is mud or soft sand, the bottom depiction will be thick and less dense. This indicates that much of the sonar signal is absorbed by the soft bottom. If the bottom is rugged and varying, such as a rocky bottom, the depiction will be textured and vary in density. Structure, such as submerged trees or brush, or other objects are clearly displayed above the solid bottom return, in varying densities of pixelization. This bottom depiction is useful in locating structure, by comparing relative density as well as depth.
The transmitted sonar signal travels downward, and is reflected back toward the surface by the bottom or other objects for display on-screen.
The signal does not stop there - it is reflected downward again by the surface of the water, and a weak "second return" is usually visible if the depth range is sufficient to see it. A second return is shown in the figure to the right. Some users use this second return as an indicator when setting the sensitivity bias.