Fonctionnement de l’aspirateur
Utilisation du mode Guard (porte virtuelle)
l de
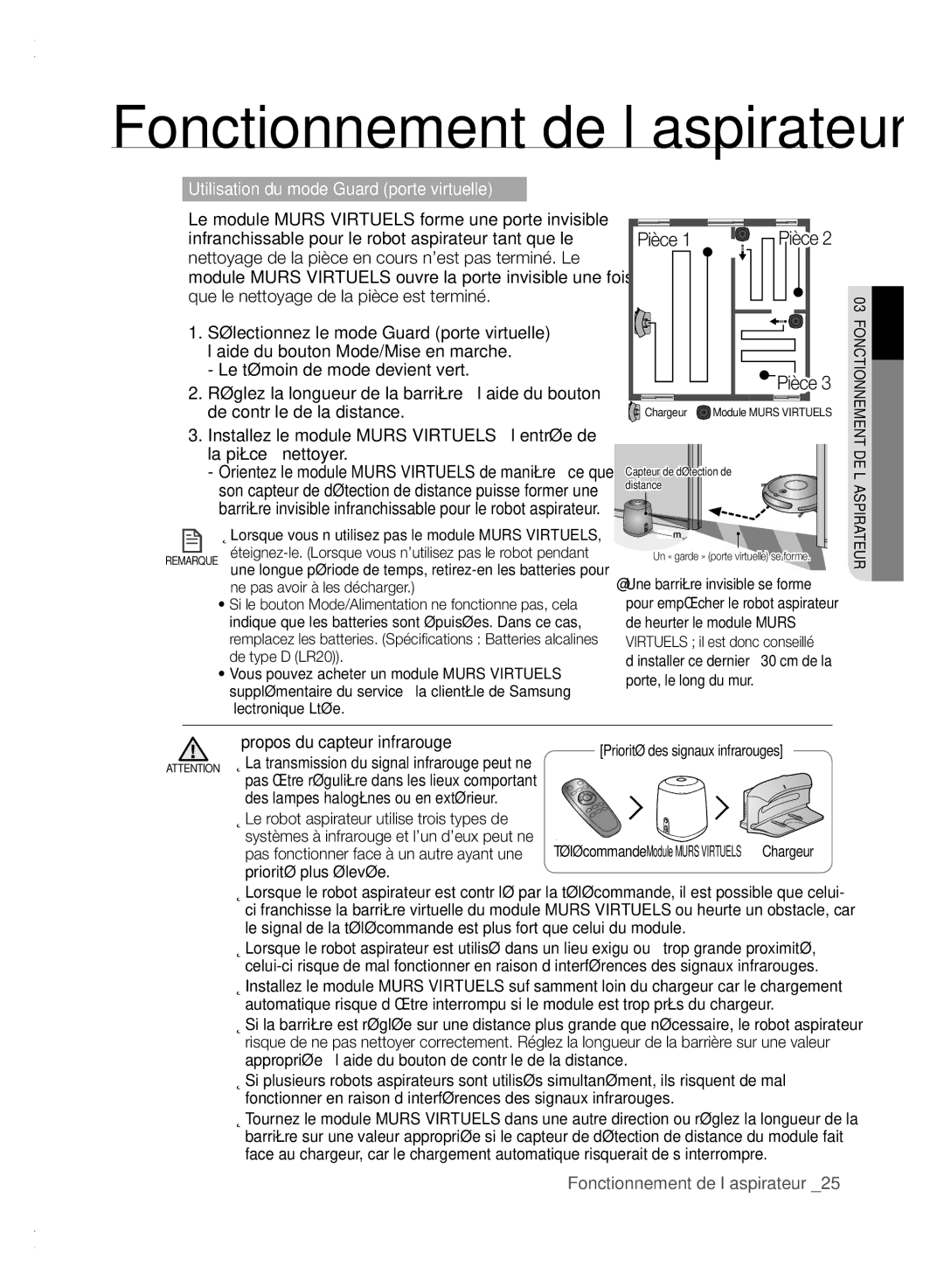
Le module MURS VIRTUELS forme une porte invisible infranchissable pour le robot aspirateur tant que le
nettoyage de la pièce en cours n’est pas terminé. Le
module MURS VIRTUELS ouvre la porte invisible une fois
que le nettoyage de la pièce est terminé.
1.Sélectionnez le mode Guard (porte virtuelle) à l’aide du bouton Mode/Mise en marche.
-Le témoin de mode devient vert.
2.Réglez la longueur de la barrière à l’aide du bouton de contrôle de la distance.
3.Installez le module MURS VIRTUELS à l’entrée de la pièce à nettoyer.
-Orientez le module MURS VIRTUELS de manière à ce que son capteur de détection de distance puisse former une barrière invisible infranchissable pour le robot aspirateur.
Pièce 1 
 Pièce 2
Pièce 2
![]() Pièce 3
Pièce 3
![]() Chargeur
Chargeur ![]() Module MURS VIRTUELS
Module MURS VIRTUELS
Capteur de détection de distance
F 03onctionnement
’
|
| ● Lorsque vous n’utilisez pas le module MURS VIRTUELS, |
| |
|
|
| ||
REMARQUE | Un « garde » (porte virtuelle) se forme. | |||
|
|
| une longue période de temps, | ✽ Une barrière invisible se forme |
|
|
| ne pas avoir à les décharger.) | |
|
| • Si le bouton Mode/Alimentation ne fonctionne pas, cela | pour empêcher le robot aspirateur | |
|
|
| indique que les batteries sont épuisées. Dans ce cas, | de heurter le module MURS |
|
|
| remplacez les batteries. (Spécifications : Batteries alcalines | VIRTUELS ; il est donc conseillé |
|
|
| de type D (LR20)). | d’installer ce dernier à 30 cm de la |
• Vous pouvez acheter un module MURS VIRTUELS | porte, le long du mur. | |
supplémentaire du service à la clientèle de Samsung | ||
| ||
Électronique Ltée. |
|
| À propos du capteur infrarouge | [Priorité des signaux infrarouges] | |
| ● La transmission du signal infrarouge peut ne | ||
ATTENTION |
|
| |
| pas être régulière dans les lieux comportant |
|
|
| des lampes halogènes ou en extérieur. |
|
|
| ● Le robot aspirateur utilise trois types de |
|
|
| systèmes à infrarouge et l’un d’eux peut ne | Télécommande Module MURS VIRTUELS | Chargeur |
| pas fonctionner face à un autre ayant une | ||
priorité plus élevée.
●Lorsque le robot aspirateur est contrôlé par la télécommande, il est possible que celui- ci franchisse la barrière virtuelle du module MURS VIRTUELS ou heurte un obstacle, car le signal de la télécommande est plus fort que celui du module.
●Lorsque le robot aspirateur est utilisé dans un lieu exigu ou à trop grande proximité,
●Installez le module MURS VIRTUELS suffisamment loin du chargeur car le chargement automatique risque d’être interrompu si le module est trop près du chargeur.
●Si la barrière est réglée sur une distance plus grande que nécessaire, le robot aspirateur risque de ne pas nettoyer correctement. Réglez la longueur de la barrière sur une valeur appropriée à l’aide du bouton de contrôle de la distance.
●Si plusieurs robots aspirateurs sont utilisés simultanément, ils risquent de mal fonctionner en raison d’interférences des signaux infrarouges.
●Tournez le module MURS VIRTUELS dans une autre direction ou réglez la longueur de la barrière sur une valeur appropriée si le capteur de détection de distance du module fait face au chargeur, car le chargement automatique risquerait de s’interrompre.
aspirateur
Fonctionnement de l’aspirateur _25