Meets or Exceeds Your Specifications
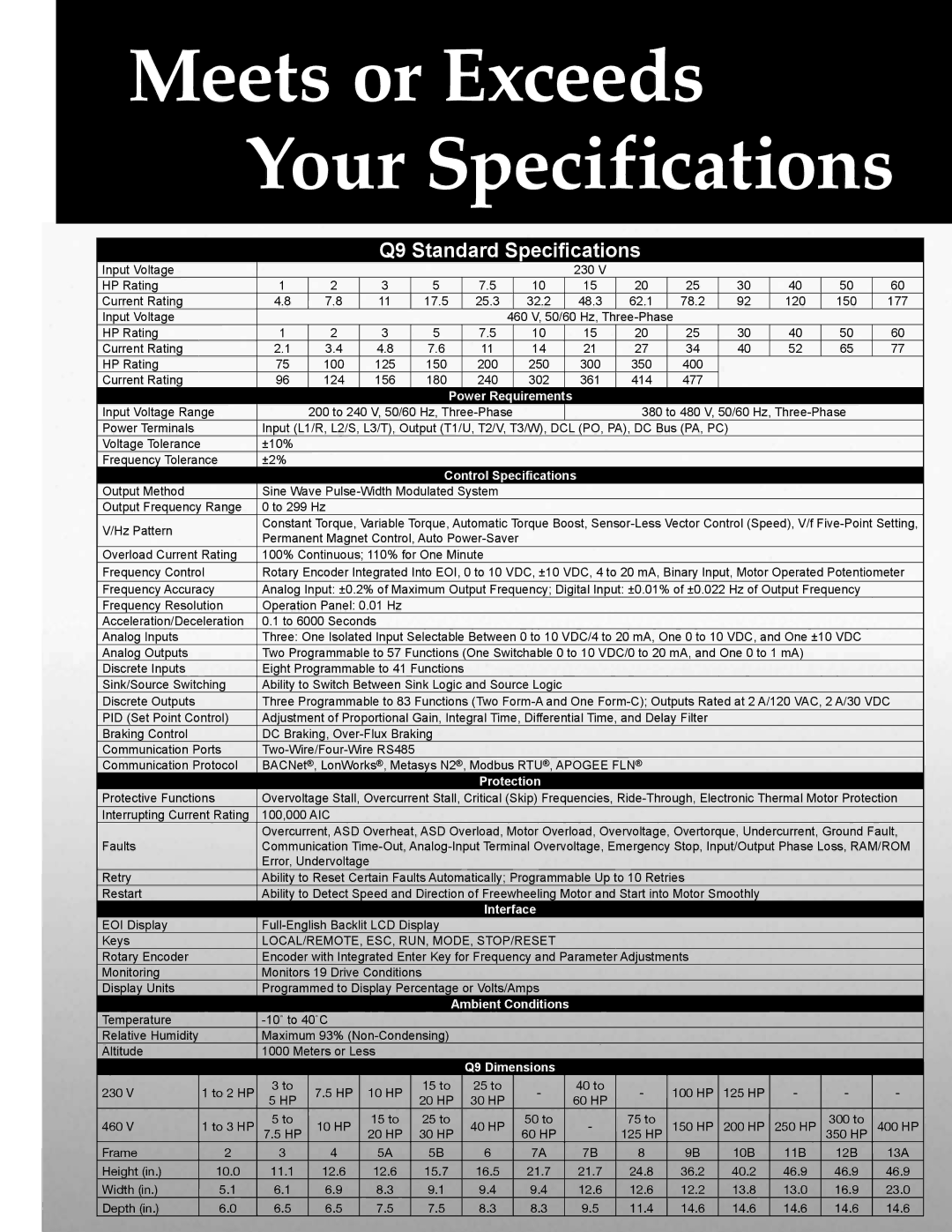
Q9 Standard Specifications
Input Voltage |
|
|
|
|
|
|
|
|
|
|
| 230 V |
|
|
|
|
|
| |
HP Rating |
| 1 | 2 | 3 |
| 5 |
| 7.5 |
| 10 |
| 15 | 20 | 25 | 30 | 40 | 50 | 60 | |
Current Rating |
| 4.8 | 7.8 | 11 |
| 17.5 |
| 25.3 |
| 32.2 |
| 48.3 | 62.1 | 78.2 | 92 | 120 | 150 | 177 | |
Input Voltage |
|
|
|
|
|
|
| 460 V, 50/60 Hz, |
|
|
|
| |||||||
HP Rating |
| 1 | 2 | 3 |
| 5 |
| 7.5 |
| 10 |
| 15 | 20 | 25 | 30 | 40 | 50 | 60 | |
Current Rating |
| 2.1 | 3.4 | 4.8 |
| 7.6 |
| 11 |
| 14 |
| 21 | 27 | 34 | 40 | 52 | 65 | 77 | |
HP Rating |
| 75 | 100 | 125 |
| 150 |
| 200 |
| 250 |
| 300 | 350 | 400 |
|
|
|
| |
Current Rating |
| 96 | 124 | 156 |
| 180 |
| 240 |
| 302 |
| 361 | 414 | 477 |
|
|
|
| |
|
|
|
|
|
|
| Power Requirements |
|
|
|
|
|
|
| |||||
Input Voltage Range |
| 200 to 240 V, 50/60 Hz, |
|
|
| 380 to 480 V, 50/60 Hz, |
| ||||||||||||
Power Terminals |
| Input (L1/R, L2/S, L3/T), Output (T1/U, T2/V, T3/W), DCL (PO, PA), DC Bus (PA, PC) |
|
|
| ||||||||||||||
Voltage Tolerance |
| ±10% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Frequency Tolerance | ±2% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| Control Specifications |
|
|
|
|
|
| ||||||
Output Method |
| Sine Wave |
|
|
|
|
|
|
|
|
| ||||||||
Output Frequency Range | 0 to 299 Hz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
V/Hz Pattern |
| Constant Torque, Variable Torque, Automatic Torque Boost, | |||||||||||||||||
| Permanent Magnet Control, Auto |
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
Overload Current Rating | 100% Continuous; 110% for One Minute |
|
|
|
|
|
|
|
|
| |||||||||
Frequency Control | Rotary Encoder Integrated Into EOI, 0 to 10 VDC, ±10 VDC, 4 to 20 mA, Binary Input, Motor Operated Potentiometer | ||||||||||||||||||
Frequency Accuracy | Analog Input: ±0.2% of Maximum Output Frequency; Digital Input: ±0.01% of ±0.022 Hz of Output Frequency |
| |||||||||||||||||
Frequency Resolution | Operation Panel: 0.01 Hz |
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
Acceleration/Deceleration | 0.1 to 6000 Seconds |
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
Analog Inputs |
| Three: One Isolated Input Selectable Between 0 to 10 VDC/4 to 20 mA, One 0 to 10 VDC, and One ±10 VDC |
| ||||||||||||||||
Analog Outputs |
| Two Programmable to 57 Functions (One Switchable 0 to 10 VDC/0 to 20 mA, and One 0 to 1 mA) |
|
| |||||||||||||||
Discrete Inputs |
| Eight Programmable to 41 Functions |
|
|
|
|
|
|
|
|
|
|
| ||||||
Sink/Source Switching | Ability to Switch Between Sink Logic and Source Logic |
|
|
|
|
|
|
| |||||||||||
Discrete Outputs |
| Three Programmable to 83 Functions (Two | |||||||||||||||||
PID (Set Point Control) | Adjustment of Proportional Gain, Integral Time, Differential Time, and Delay Filter |
|
|
|
| ||||||||||||||
Braking Control |
| DC Braking, |
|
|
|
|
|
|
|
|
|
|
| ||||||
Communication Ports |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
Communication Protocol | BACNet®, LonWorks®, Metasys N2®, Modbus RTU®, APOGEE FLN® |
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
|
|
| Protection |
|
|
|
|
|
|
| |||
Protective Functions | Overvoltage Stall, Overcurrent Stall, Critical (Skip) Frequencies, | ||||||||||||||||||
Interrupting Current Rating | 100,000 AIC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
| Overcurrent, ASD Overheat, ASD Overload, Motor Overload, Overvoltage, Overtorque, Undercurrent, Ground Fault, | ||||||||||||||||
Faults |
| Communication | |||||||||||||||||
|
|
| Error, Undervoltage |
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Retry |
| Ability to Reset Certain Faults Automatically; Programmable Up to 10 Retries |
|
|
|
| |||||||||||||
Restart |
| Ability to Detect Speed and Direction of Freewheeling Motor and Start into Motor Smoothly |
|
|
| ||||||||||||||
|
|
|
|
|
|
|
|
| Interface |
|
|
|
|
|
|
| |||
EOI Display |
|
|
|
|
|
|
|
|
|
|
|
| |||||||
Keys |
| LOCAL/REMOTE, ESC, RUN, MODE, STOP/RESET |
|
|
|
|
|
|
| ||||||||||
Rotary Encoder |
| Encoder with Integrated Enter Key for Frequency and Parameter Adjustments |
|
|
|
| |||||||||||||
Monitoring |
| Monitors 19 Drive Conditions |
|
|
|
|
|
|
|
|
|
|
| ||||||
Display Units |
| Programmed to Display Percentage or Volts/Amps |
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
| Ambient Conditions |
|
|
|
|
|
|
| |||||
Temperature |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
Relative Humidity |
| Maximum 93% |
|
|
|
|
|
|
|
|
|
|
| ||||||
Altitude |
| 1000 Meters or Less |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
| Q9 Dimensions |
|
|
|
|
|
|
| |||
230 V |
| 1 to 2 HP | 3 to | 7.5 HP | 10 HP |
| 15 to |
| 25 to |
| - |
| 40 to | - | 100 HP | 125 HP | - | - | - |
| 5 HP |
| 20 HP |
| 30 HP |
|
| 60 HP | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
460 V |
| 1 to 3 HP | 5 to | 10 HP | 15 to |
| 25 to |
| 40 HP |
| 50 to |
| - | 75 to | 150 HP | 200 HP | 250 HP | 300 to | 400 HP |
| 7.5 HP | 20 HP |
| 30 HP |
|
| 60 HP |
| 125 HP | 350 HP | |||||||||
Frame |
| 2 | 3 | 4 | 5A |
| 5B |
| 6 |
| 7A |
| 7B | 8 | 9B | 10B | 11B | 12B | 13A |
Height (in.) |
| 10.0 | 11.1 | 12.6 | 12.6 |
| 15.7 |
| 16.5 |
| 21.7 |
| 21.7 | 24.8 | 36.2 | 40.2 | 46.9 | 46.9 | 46.9 |
Width (in.) |
| 5.1 | 6.1 | 6.9 | 8.3 |
| 9.1 |
| 9.4 |
| 9.4 |
| 12.6 | 12.6 | 12.2 | 13.8 | 13.0 | 16.9 | 23.0 |
Depth (in.) |
| 6.0 | 6.5 | 6.5 | 7.5 |
| 7.5 |
| 8.3 |
| 8.3 |
| 9.5 | 11.4 | 14.6 | 14.6 | 14.6 | 14.6 | 14.6 |