bps. b0: 4800bps, b1: 9600bps, (factory setting) b2: 19200bps, b3: 38400 bps, b4: 57600 bps, b5:
115200 bps,
only) b15=0: ASCII mode, b15=1: RTU mode. Communication format: ASCII mode is 7Bit, even bit, 1 stop bit (7 E 1), while RTU mode is 8Bit, even bit, 1 stop bit (8 E 1).
10.CR#33 is used to set the internal function priority. For example: characteristic register. Output latched function will save output setting to the internal memory before power loss.
11.CR#34 is software version of model type.
12.CR#35~ CR#48 are used for system.
13.The corresponding parameters address H4032~H4063 of CR#0~CR#48 are provided for user to read/write data via
A.Communication baud rate: 4800, 9600, 19200, 38400, 57600, 115200 bps.
B.Communication format: ASCII mode is 7Bit, even bit, 1 stop bit (7 E 1). Communication format of RTU mode is 8Bit, even bit, 1 stop bit (8 E 1).
C.Function code:
5 | ADJUST D/A CONVERSION CHARACTERISTIC CURVE |
5.1Adjust D/A Conversion Characteristic Curve
Voltage output mode:
10V |
|
|
| Mode 0 of CR#1: GAIN = 5V(2000LSB), | |
| mode 1 |
| OFFSET=0V (0LSB) | ||
|
|
| |||
|
| Mode 1 of CR#1: GAIN = 6V(2400LSB), | |||
|
|
|
| ||
|
|
| mode 0 |
| OFFSET=2V (800LSB). |
|
|
| GAIN: | The setting range of voltage output value when | |
6V | GAIN |
|
| ||
5V |
|
|
| digital input value is K2000 should be | |
|
|
|
| ||
|
|
|
|
| |
voltage |
|
|
| OFFSET: | |
output |
|
|
| The setting range of voltage output value when | |
2V |
|
|
|
| digital input value is K0 should be |
0 |
| +2000 | +4000 |
| |
OFFSET | GAIN-OFFSET: Setting range: +1V~+15V (+400LSB ~ +6000 LSB). | ||||
Digital input
Current output mode
| 20mA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Mode 2 of CR#1: GAIN = 12mA (2400LSB), | |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| mode 2 |
|
|
| OFFSET=4mA (800LSB). | |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Mode 3 of CR#1: GAIN = 10mA (2000LSB), | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
| mode 3 |
|
| OFFSET=0mA (0LSB). | ||||
| 10mA | GAIN |
|
| GAIN: | The setting range of current output when digital | |||||||||||||||
| 12mA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| input value is K2000 should be | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
current |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
output |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| OFFSET: | The setting range of current output when digital | |||
| 4mA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| input value is K0 should be | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
OFFSET +2000 | +4000 GAIN-OFFSET: Setting range: +2mA~+30mA (+400LSB | ||||||||||||||||||||
|
|
| |||||||||||||||||||
digital input | ~+6000LSB). |
|
The charts above are D/A conversion characteristic curve of voltage input mode and current input
6 | INITIAL PLC |
| Lamp display |
1.When power is on, POWER LED will be lit and ERROR LED will be lit for 0.5 second.
2.It is normal that POWER LED should be lit and ERROR LED should turn off. When power supply is lower than 19.5V, ERROR LED will blink continuously till the power voltage is higher than 19.5V.
3.When it connects to PLC MPU in series, RUN LED on MPU will be lit and A/D LED or D/A LED should blink.
4.After receiving the first
5.After converting, ERROR LED should blink if input or output exceeds the upper bound or below
the lower bound. Program example:
M1000 |
| FROM | K1 | K0 | D0 | K1 |
|
| |||||
|
| CMP | H89 | D0 | M0 |
|
M1013 |
|
|
|
|
|
|
|
| INC | D100 |
|
|
|
|
| ADD | D101 | K5 | D101 |
|
LD= | K4000 | D100 | RST | D100 |
|
|
LD= | K4000 | D101 | RST | D101 |
|
|
M1 |
| TO | K1 | K1 | H10 | K1 |
|
| |||||
M1 |
| TO | K1 | K6 | D100 | K2 |
|
| |||||
|
| END |
|
|
|
|
Explanation:
Read the data of model type from expansion module K1 and distinguish if the data is H89
D100 will increase K1 and D101 will increase K5 every second. When value of D100 and D101 attain to K4000, they will be reset to 0.
If the model type is
Writing output setting CR#6 and CR#7 to D100 and D101. Analog output will vary with D100 and D101 value.
7 | COMMAND EXPLANATION |
API |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Read special module | Adaptive model | |||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
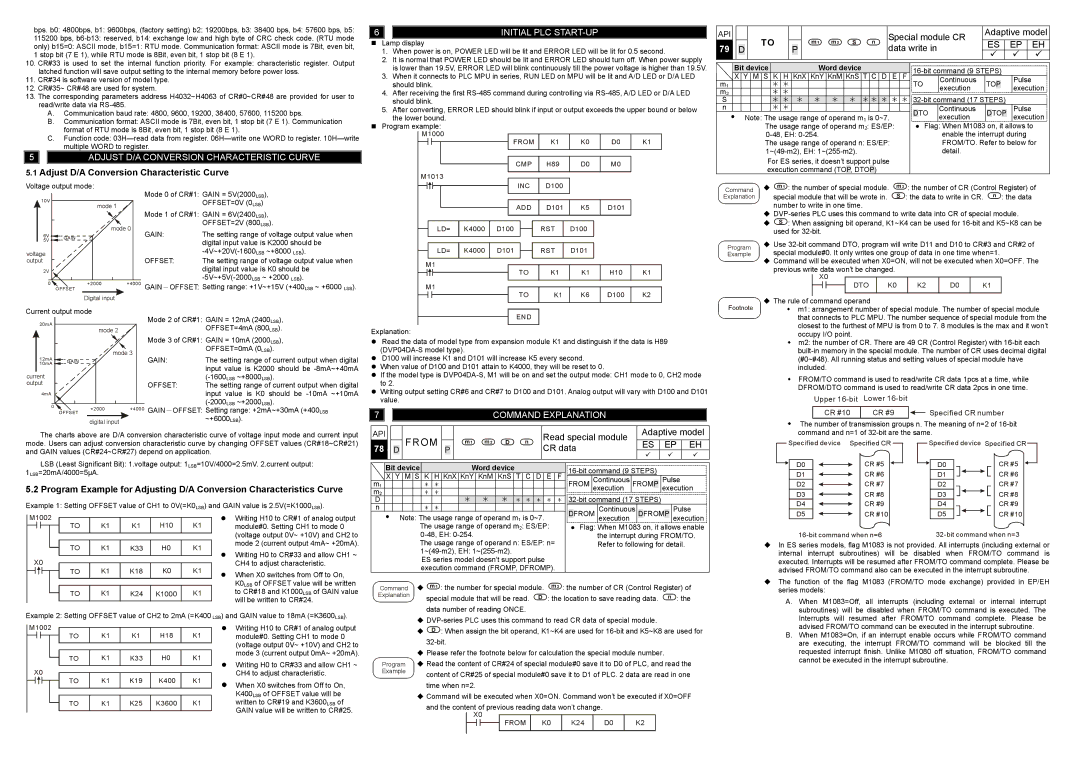
API |
| TO |
| Special module CR | Adaptive model | |||||
79 | D | P | data write in |
| ES |
| EP EH | |||
|
|
|
|
|
| |||||
| Bit device |
| Word device |
| F |
|
| |||
| X Y M S K H KnX KnY KnM KnS T C D | E |
| Pulse | ||||||
m1 |
|
| ¼ ¼ |
|
| TO | Continuous | TOP |
| |
|
|
|
| execution |
| execution | ||||
m2 |
|
| ¼ ¼ |
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| ||
S |
|
| ¼ ¼ ¼ ¼ ¼ ¼ ¼ ¼ ¼ ¼ ¼ |
| ||||||
n |
|
| ¼ ¼ |
|
| DTO | Continuous | DTOP | Pulse | |
| Note: The usage range of operand m1 is 0~7. | execution | execution | |||||||
|
| The usage range of operand m2: ES/EP: | Flag: When M1083 on, it allows to | |||||||
|
|
|
| enable the interrupt during | ||||||
|
| The usage range of operand n: ES/EP: |
| FROM/TO. Refer to below for | ||||||
|
|
|
| detail. |
|
|
| |||
|
| For ES series, it doesn’t support pulse |
|
|
|
|
| |||
|
| execution command (TOP, DTOP) |
|
|
|
|
|
| ||
Command |
| : the number of special module. | : the number of CR (Control Register) of | |||||||
Explanation |
| special module that will be wrote in. |
| : the data to write in CR. | : the data | |||||
|
|
| number to write in one time. |
|
|
|
|
|
| |
|
|
| ||||||||
|
|
| : When assigning bit operand, K1~K4 can be used for | |||||||
|
|
| used for |
|
|
|
|
|
| |
Program |
| Use | ||||||||
Example |
| special module#0. It only writes one group of data in one time when=1. |
|
| ||||||
|
|
| Command will be executed when X0=ON, will not be executed when X0=OFF. The | |||||||
|
|
| previous write data won’t be changed. |
|
|
|
|
| ||
|
|
|
| X0 |
|
|
|
|
|
|
|
|
|
| DTO | K0 | K2 | D0 | K1 |
|
|
The rule of command operand
Footnotem1: arrangement number of special module. The number of special module that connects to PLC MPU. The number sequence of special module from the closest to the furthest of MPU is from 0 to 7. 8 modules is the max and it won’t occupy I/O point.
m2: the number of CR. There are 49 CR (Control Register) with
FROM/TO command is used to read/write CR data 1pcs at a time, while DFROM/DTO command is used to read/write CR data 2pcs in one time.
Upper
CR #10 | CR #9 | Specified CR number |
The number of transmission groups n. The meaning of n=2 of
mode. Users can adjust conversion characteristic curve by changing OFFSET values (CR#18~CR#21) and GAIN values (CR#24~CR#27) depend on application.
78 D | FROM | CR data | ES EP EH |
P |
|
Specified device Specified CR |
Specified device Specified CR
LSB (Least Significant Bit): 1.voltage output: 1LSB=10V/4000=2.5mV. 2.current output: 1LSB=20mA/4000=5µA.
5.2 Program Example for Adjusting D/A Conversion Characteristics Curve
Example 1: Setting OFFSET value of CH1 to 0V(=K0LSB) and GAIN value is 2.5V(=K1000LSB).
Bit device | Word device |
|
|
X Y M S K H KnX KnY KnM KnS T C D | E | F | |
m1 | ¼ ¼ |
|
|
m2 | ¼ ¼ |
|
|
D | ¼ ¼ ¼ ¼ ¼ ¼ | ¼ | ¼ |
n | ¼ ¼ |
|
|
![]()
Continuous |
| Pulse |
FROM execution | FROMP | execution |
| ||
DFROM Continuous DFROMP Pulse | ||
D0 |
|
| CR #5 |
| |||
D1 |
|
| CR #6 |
| |||
D2 |
|
| CR #7 |
| |||
D3 |
|
| CR #8 |
| |||
D4 |
|
| CR #9 |
| |||
D5 |
|
| CR #10 |
| |||
|
|
|
|
D0 | CR #5 |
D1 | CR #6 |
D2 | CR #7 |
D3 | CR #8 |
D4 | CR #9 |
D5 | CR #10 |
M1002 | K1 | K1 | H10 | K1 |
TO |
Writing H10 to CR#1 of analog output module#0. Setting CH1 to mode 0 (voltage output 0V~ +10V) and CH2 to
Note: The usage range of operand m1 is 0~7. The usage range of operand m2: ES/EP:
execution | execution |
Flag: When M1083 on, it allows enable the interrupt during FROM/TO.
TO | K1 | K33 | H0 | K1 |
X0 | K1 | K18 | K0 | K1 |
TO |
mode 2 (current output 4mA~ +20mA).
Writing H0 to CR#33 and allow CH1 ~ CH4 to adjust characteristic.
When X0 switches from Off to On,
The usage range of operand n: ES/EP: n=
ES series model doesn’t support pulse execution command (FROMP, DFROMP).
Refer to following for detail.
In ES series models, flag M1083 is not provided. All interrupts (including external or internal interrupt subroutines) will be disabled when FROM/TO command is executed. Interrupts will be resumed after FROM/TO command complete. Please be advised FROM/TO command also can be executed in the interrupt subroutine.
TO | K1 | K24 K1000 | K1 |
K0LSB of OFFSET value will be written to CR#18 and K1000LSB of GAIN value will be written to CR#24.
Command | : the number for special module. | : the number of CR (Control Register) of | |
Explanation | special module that will be read. | : the location to save reading data. | : the |
| |||
The function of the flag M1083 (FROM/TO mode exchange) provided in EP/EH series models:
A. When M1083=Off, all interrupts (including external or internal interrupt |
Example 2: Setting OFFSET value of CH2 to 2mA (=K400 LSB) and GAIN value to 18mA (=K3600LSB).
data number of reading ONCE.
subroutines) will be disabled when FROM/TO command is executed. The |
Interrupts will resumed after FROM/TO command complete. Please be |
M1002 | K1 | K1 | H18 | K1 |
TO | ||||
TO | K1 | K33 | H0 | K1 |
X0 | K1 | K19 | K400 | K1 |
TO | ||||
TO | K1 | K25 | K3600 | K1 |
Writing H10 to CR#1 of analog output module#0. Setting CH1 to mode 0 (voltage output 0V~ +10V) and CH2 to mode 3 (current output 0mA~ +20mA).
Writing H0 to CR#33 and allow CH1 ~ CH4 to adjust characteristic.
When X0 switches from Off to On, K400LSB of OFFSET value will be written to CR#19 and K3600LSB of GAIN value will be written to CR#25.
![]() : When assign the bit operand, K1~K4 are used for
: When assign the bit operand, K1~K4 are used for
| |
| Please refer the footnote below for calculation the special module number. |
Program | Read the content of CR#24 of special module#0 save it to D0 of PLC, and read the |
Example | content of CR#25 of special module#0 save it to D1 of PLC. 2 data are read in one |
|
time when n=2.
Command will be executed when X0=ON. Command won’t be executed if X0=OFF and the content of previous reading data won’t change.
X0
FROM K0 | K24 | D0 | K2 |
advised FROM/TO command can be executed in the interrupt subroutine. |
B. When M1083=On, if an interrupt enable occurs while FROM/TO command |
are executing, the interrupt FROM/TO command will be blocked till the |
requested interrupt finish. Unlike M1080 off situation, FROM/TO command |
cannot be executed in the interrupt subroutine. |