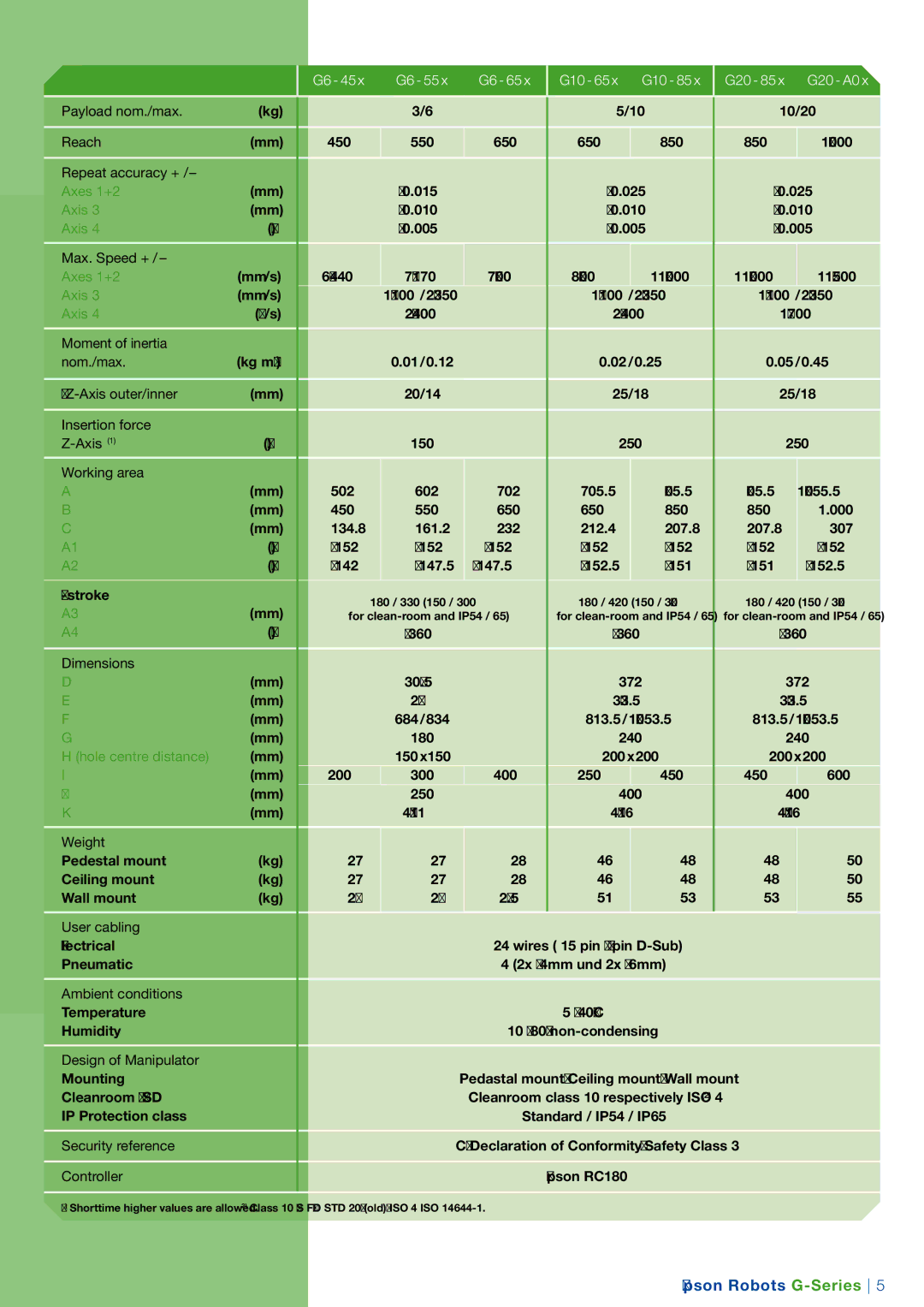
Payload nom./max. | (kg) |
Reach | (mm) |
Repeat accuracy + / – |
|
Axes 1+2 | (mm) |
Axis 3 | (mm) |
Axis 4 | (°) |
Max. Speed + / – |
|
Axes 1+2 | (mm / s) |
Axis 3 | (mm / s) |
Axis 4 | (° / s) |
Moment of inertia |
|
nom./max. | (kg m² ) |
Ø | (mm) |
Insertion force |
|
(N) | |
Working area |
|
A | (mm) |
B | (mm) |
C | (mm) |
A1 | (°) |
A2 | (°) |
| |
A3 | (mm) |
A4 | (°) |
Dimensions |
|
D | (mm) |
E | (mm) |
F | (mm) |
G | (mm) |
H (hole centre distance) | (mm) |
I | (mm) |
J | (mm) |
K | (mm) |
Weight |
|
Pedestal mount | (kg) |
Ceiling mount | (kg) |
Wall mount | (kg) |
User cabling |
|
3/6
450 | 550 | 650 |
| ± 0.015 |
|
| ± 0.010 |
|
| ± 0.005 |
|
6,440 | 7,170 | 7,900 |
| 1,100 / 2,350 |
|
| 2,400 |
|
| 0.01 / 0.12 |
|
| 20/14 |
|
| 150 |
|
502 | 602 | 702 |
450 | 550 | 650 |
134.8 | 161.2 | 232 |
± 152 | ± 152 | ± 152 |
± 142 | ± 147.5 | ± 147.5 |
180 / 330 (150 / 300
for
± 360
309.5
299
684 / 834
180
150 x150
200 | 300 | 400 |
| 250 |
|
|
| |
27 | 27 | 28 |
27 | 27 | 28 |
29 | 29 | 29.5 |
5/10
650850
±0.025
±0.010
±0.005
8,900 11,000
1,100 / 2,350
2,400
0.02 / 0.25
25/18
250
705.5 | 905.5 |
650 | 850 |
212.4 | 207.8 |
± 152 | ± 152 |
± 152.5 | ± 151 |
180 / 420 (150 / 390
for
± 360
372
393.5
813.5 / 1,053.5
240
200 x 200
250 | 450 |
400 |
|
| |
46 | 48 |
46 | 48 |
51 | 53 |
10/20
8501,000
±0.025
±0.010
±0.005
11,000 11,500
1,100 / 2,350
1,700
0.05 / 0.45
25/18
250
905.5 | 1,055.5 |
850 | 1.000 |
207.8 | 307 |
± 152 | ± 152 |
± 151 | ± 152.5 |
180 / 420 (150 / 390
for
± 360
372
393.5
813.5 / 1,053.5
240
200 x 200
450 | 600 |
400 |
|
| |
48 | 50 |
48 | 50 |
53 | 55 |
Electrical |
Pneumatic |
Ambient conditions |
Temperature |
Humidity |
Design of Manipulator |
Mounting |
Cleanroom & ESD |
IP Protection class |
Security reference |
Controller |
24 wires ( 15 pin + 9 pin
5 – 40°C
10 – 80%,
Pedastal mount, Ceiling mount, Wall mount Cleanroom class 10 respectively ISO 4 (2)
Standard / IP54 / IP65
CE Declaration of Conformity, Safety Class 3
Epson RC180
¹) Shorttime higher values are allowed. 2) Class 10 US FED STD 209E (old), ISO 4 ISO
Epson Robots