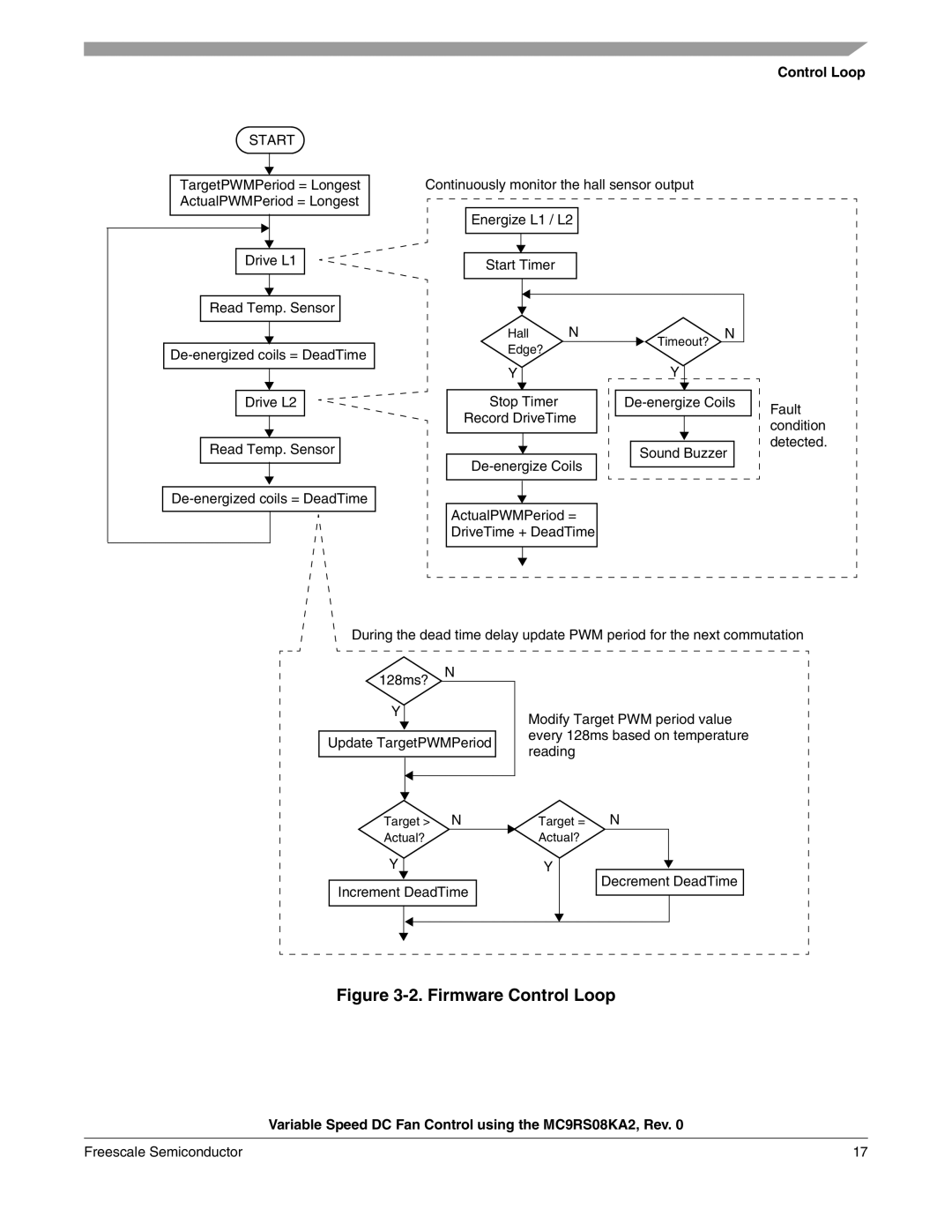
START
TargetPWMPeriod = Longest ActualPWMPeriod = Longest
Drive L1
Read Temp. Sensor
Control Loop
Continuously monitor the hall sensor output
Energize L1 / L2
Start Timer
Hall | N | Timeout? | N |
Edge? |
|
| |
|
|
|
Drive L2
Read Temp. Sensor
Y
Stop Timer
Record DriveTime
ActualPWMPeriod = DriveTime + DeadTime
Y
Sound Buzzer
Fault condition detected.
During the dead time delay update PWM period for the next commutation
128ms?
Y
N
Modify Target PWM period value every 128ms based on temperature
Update TargetPWMPeriod
Target > N
Actual?
Y
Increment DeadTime
reading
Target = N
Actual?
Y![]()
Decrement DeadTime
Figure 3-2. Firmware Control Loop
Variable Speed DC Fan Control using the MC9RS08KA2, Rev. 0
Freescale Semiconductor | 17 |