Digital Color Camera
Please register your product at
Safety information
Digital Color Camera
Risk of Electric Shock Do not Open
IC Compliance Notice
FCC Statement
This device may not cause harmful interference,
English
Important Safety Instructions
Contents
Features
Introduction
DAY/NIGHT
Product & Accessories
Product & Accessories Main Product Camera
Camera HolderMount Mount Adapter User’s Manual
Part Names and Functions
Connector
Auto Iris Lens Control Cable Auto Iris Lens Connector
Side View Mount Adapter Fixing Grooves Auto Iris Lens
Rear Panel AC24/DC12V B2333P AC220V~240VSCC-B2033P
Alarm out port for motion detection. Open collector type
Connector
Mounting the Lens
Installation
GND cable with the white stripe line
Using Icons in the Menu
Main Menu
How to use OSD Menu
Profile
ITS
Backlight
Gaming
Lens menu is used if you select a type of the AI lens
Camera Setup
Iris
Camera ID
AGC OFF, Very LOW, LOW, MID, HIGH, Very HIGH, USER, FIX
Reduces the noise on the screen
Motion
DNR
Shutter
DAY
SENS-UP
Flickerless
Night
Auto
EXT
White BAL
Digital Zoom
Modes are provided
Intelligence
Sizing
How to set the line
How to set the area
FIXED/MOVED
Alarm OUT
Privacy Zone Setup
Resolution
Display
Factory Defaults
Other SET
OSD Color
Language
Communication
System Information
Protocol
Flickerless OFF XDR MID DAY/NIGHT Auto Digital Zoom
Camera ID OFF Iris ALC AGC
DNR MID Shutter OFF SENS-UP
Detail AGC Color SUP MID Reverse
Specifications
Specifications
BLC
Specifications
SCC-B2333P / SCC-B2033P
Items Sub-items SCC-B2333P / SCC-B2033P
Page
Caméra Numérique Couleur
Caméra Numérique Couleur
Directives de sécurité
Avertissement
Risque DE Echoc Electrique NE PAS Ouvrir
Directives de sécurité
Notification de conformité d’IC
Consignes de sécurité importantes
Comment utiliser le menu des écrans
Contenu
Introduction Caractéristiques
Profil
Caractéristiques
JOUR/NUIT
Support de caméra
Produit ET Accessoires
Produit et Accessoires Partie principale du produit Caméra
Guide d’utilisation
Connecteur
Noms ET Fonctions DES Pièces
Vue de côté
’objectif à iris
Panneau arrière AC24/DC12V SCC-B2333P AC220V~240VSCC-B2033P
Connecteur d’entrée/sortie
Fonction Description
Objectif CS Lors de l’utilisation de l’objectif C
Montage DE L’OBJECTIF
Lors de l’utilisation de l’objectif CS
Qu’illustré Lens
Branchement DES Câbles ET Vérification DU Fonctionnement
GND câble avec la ligne blanche
Câble BNC Borne de sortie vidéo Remarque
Menu Principal
Nuit
Profil
ALC Objectif Niveau Retroecl
EXT
Retroecl
JEU
Configuration DE LA Caméra
ID DE CAMERAOFF, on
Chute au-dessous de la valeur normale
ELC Contrôle électronique de la lumière
HAUT, UTIL, Fixe
Le niveau AGC
Mouve
Obturateur
Connectez chaque borne à GND
Nuit
Augmenter Sens
Jour
OFF/ON
BAL Blancs
JOUR/NUIT
BA2 la température de couleur va de 2 000 K à 10 000 K
Zoom NUM
Detail 0~3
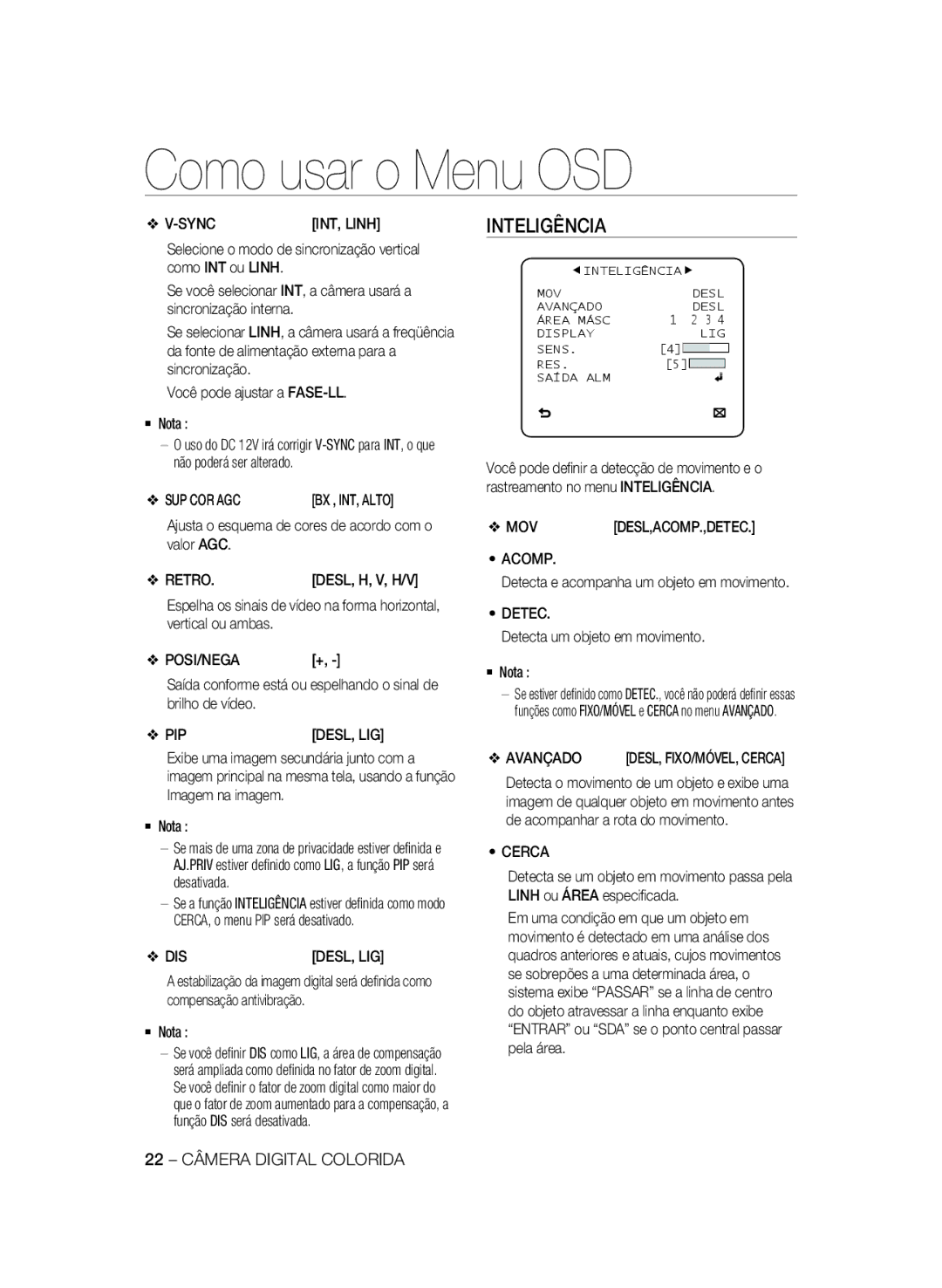
Suivi
Inverse
OFF, on
Avance
FIXE/DEPLACE
Zone Masquage 1~4
Sort Alarme
Un deuxième objet filtre le premier objet en mouvement
Affichage
Autre Réglage
Reinit Reglage Usine
Coulr OSD
Protocole
Langue
Renseignements SUR LE Système
Vitesse
Mouve Vite DNR Moyen Obturateur OFF Augmenter Sens
Table de configuration initiale
ID DE Camera OFF Iris ALC AGC
Auto
Caractéristiques techniques
Caractéristiques Techniques
Cjour
Caractéristiques techniques
Articles Sous-articles SCC-B2333P / SCC-B2033P
Emballage 173W x 99H x 115D mm
Page
Cámara Digital a Color
Cámara Digital a Color
Información de Seguridad
Advertencia
No Abrir Riesgode Sufrir UNA Descarga Eléctrica
Precaución
Aviso de Conformidade com a IC
Español
Instrucciones importantes de seguridad
Índice general
Introducción
Características
DIA/NOCHE
Sostén de la cámara Base de sujeción Manual de usuario
Producto Y Accesorios
Producto Y Accesorios Producto principal Camara
Base
Nombre DE LOS Componentes Y Funciones
Vista lateral
Conector de la óptica de diafragma automático Auto Iris
Panel trasero AC24/DC12V SCC-B2333P AC220V~240VSCC-B2033P
10 Cámara Digital a Color
Bajo0V modo NOCHEByN
Tipo de
Uso de la lente CS
Lente CS
Uso de la lente C
GND cable con la línea blanca
Instalación
Conexión DE Cables Y Comprobaciones DE Funcionamiento
Cable BNC Terminal de salida de video Nota
Utilización DE LOS Iconos DEL Menú
Menú Principal
14 Cámara Digital a Color
Cómo utilizar el menú OSD
Perfil
ALC Lent Nivel LUZ Fondo
LUZ Fondo
Juegos
El menú Lent se utiliza si selecciona un tipo de lente AI
ID Camara Iris
ALC Control automático de luz
16 Cámara Digital a Color
ELC Control electrónico de luz
AGC NO, MUY BAJA, BJ, INT, ALTO, MUY ALTA, USU., Fija
AGC Fijo
18 Cámara Digital a Color
DIA
AMP Sens
SIN Parp
Noche
Area Masc EXT
20 Cámara Digital a Color
DIA/NOCHE
Noche Zoom Digital
DET.0~3 Controla la distinción horizontal o vertical Español
Inteligencia
Cómo definir el área
Puede producirse un error de detección FIJO/ Movil si
Cómo definir la línea
FIJO/MOVIL
Configuración DE LA Zona Privada
ESTAND. Fabrica
Otros Ajustes
Cómo definir el punto
Todos los ajustes recuperan sus valores de fábrica
Comunicación
Información DEL Sistema
Idioma
OBT AMP Sens
ID Camara Iris ALC AGC
MOV
SIN Parp XDR
Especificaciones
Especificaciones
28 Cámara Digital a Color
Especificaciones
30 Cámara Digital a Color
Bloq lin
Especificaciones
Page
デジタルカラーカメラ
から製品登録を行ってください。
この記号は、この器具には感電する恐れのある 高電流が存在することを示しています。
器を湿度や埃、すすのある場所に設置しないで下さい。火災や感電の原因になります。
10.お手入れの際、製品のパーツに直接水を噴霧しないで下さい。火災や感電の原因になります。 デジタルカラーカメラ
FCC 声明
直射日光や放熱源に近づけないで下さい。火災の原因になります。 通気性のいい場所に設置して下さい。
メインプラグは切断装置として使用され、いつでも利用可能になります。
IC遵守のお知らせ
重要な安全ガイド
11.メーカーが指定する付属品のみを使用してください。
はじめに
オートアイリスレンズ・アダプターの接続
OSDメニューの使用法
XDR(ダイナミックレンジ拡張)
高解像度
インテリジェントモーション検知およびトレース
デイ/ナイト
主な製品 カメラ
カメラホルダーマ Cマウント・アダプター ユーザーマニュアル
ウント
ンズ・コネクター
側面図
オートアイリスレ
自動絞りレンズ調 整ケーブル オートアイリスレンズ・コネクター
リヤパネル
AC24/DC12V SCC-B2333P AC220V~240VSCC-B2033P
出来ます。 このスイッチの上または下を押すと、メニューを上下に移行出来ます
Setup スイッチ
入力/出力コネクタ
接地ポートです。 電源接続ポート 電源ケーブルに接続されています。 10 デジタルカラーカメラ
CSレンズを使用する場合
CS レンズ
Cレンズを使用する場合
映像入力ポートに接続します。
① BNCケーブルの一方の終端をカメラ背面にあ る映像出力ポートに接続します。
② BNCケーブルのもう一方の終端をモニターの
ビデオアウト端子
プロフイ-ル
メニュー設定を終了します。
前のメニューに戻ります。 メインメニューに戻ります。 変更保存
カメラ設定
ALC
プロフイ-ルメニューで、次のカメラ設定を一度に選択できます。
14 デジタルカラーカメラ
DNR
OSDメニューの使用法
アイリス
カメラID
します。
ALC 自動光量調整
ELC 電子光量調整
オフ, 最低, 低, 中, 高, 最高, ユ-ザ, FIX
ザモードでは、ユーザ定義を最低から最高まで 16段階に分けることができます。
操作については次の表を参照してください。
ション 最低速, 低速, 通常, 高速, 最高速
シャッタ
18 デジタルカラーカメラ
デイ /ナイト
感度アップ
フリッカレス オフ, オン
ドに固定されます。 ナイト
ホワイトバランス
20 デジタルカラーカメラ
デジタルズ-ム オン/オフ
ATW1自動追跡ホワイトバランスモード1
赤の強さを調整します。 青の強さを調整します。
を押すと、
デジタル手ブレ補正 オフ, オン
LLフェ-ズを調整できます。 注
反転 オフ, 水平, 垂直, 水平/垂直
動く被写体を検知しトレースします。 動く被写体を検知します。 注
場合は、 スイッチを1回押して移動 するピクセルを指定します。
④ 位置でSETUPスイッチを押し、
境界の設定方法
エリアの設定方法
ディスプレイ
マスクエリア 1~4
マスク対象の検知例外エリアを指定します。
モーション検知の感度を設定します。
工場初期値
点の設定方法 それぞれの位置を4つの点で設定できます。
位置の設定方法
カラ- 白黒, R/G/B
アドレス
カメラ入出力コネクタ
プロトコル 通信プロトコルを選択します。 通信速度 通信速度を選択します。 注
このカメラでは、5つの言語が使用可能です。 該当する言語を選択します。 26 デジタルカラーカメラ
ション最高速
初期設定テーブル
カメラIDオフ
シャッタ-オフ 感度アップ
サブ項目
SCC-B2333N
28 デジタルカラーカメラ
サブ項目
SCC-B2333P / SCC-B2033P
30 デジタルカラーカメラ
レンズ
Page
Câmera Digital Colorida
Câmera Digital Colorida
Informações de segurança
Aviso
Risco DE Choque ELÉTRICO. NÃO Abra
Atenção
Declaração FCC
Português
Instruções importantes de segurança
Conteúdo
Introdução
DIA/NOITE
Produtos E Acessórios
Manual do usuário
Montagem
Funções E Nomes DAS Peças
Conector das
Lentes Auto Iris
Painel traseiro AC24/DC12V SCC-B2333P AC220V~240VSCC-B2033P
Esquerda ou direita no menu ou alterar o valor exibido
10 Câmera Digital Colorida
Ligando O Conector DAS Montando AS Lentes Lentes Auto Iris
Instalação
Cabo BNC Terminal da saída de vídeo Nota
12 Câmera Digital Colorida
Usando Ícones no Menu
Como usar o Menu OSD
14 Câmera Digital Colorida
VER Azul Noite
LUZ Fundo
Jogo
Brilho
16 Câmera Digital Colorida
Configuração DA Câmera
ID Câmera Íris
ID Câmera
ELC Controle de luz eletrônico
AGC DESL, Muito BX, BX, INT, ALTO, MT ALTA, USU., AJS
Menu AGC Controle de ganho automático
18 Câmera Digital Colorida
‹AJS AGC‹
Noite
AM Sens
SEM Trem
LIG Desl
Noite será mascarada Nota
20 Câmera Digital Colorida
Azul Ajusta a intensidade da cor azul
DET ~3 Controla a distinção horizontal ou vertical
LIG/DESL
Inteligência
FIXO/MÓVEL
Como definir a linha
Como definir a área
Um erro de detecção FIXO/MÓVEL poderá ocorrer, se
Saída ALM
Configuração DA Zona DE Privacidade
Área Másc
24 Câmera Digital Colorida
Outra Definição
Padrões Fábrica
COR OSD
Comun Informações do Sistema
TX Bauds
26 Câmera Digital Colorida
Configuração da Câmera
Tabela de Configuração Inicial
Especificações
Especificações
28 Câmera Digital Colorida
Especificações
Itens Subitens SCC-B2333P / SCC-B2033P
30 Câmera Digital Colorida
Pacote X 99 a x 115 P mm
AB68-00785A