Informazioni sul sensore IrDA
•La trasmissione a infrarossi potrebbe essere avvertenza irregolare nei luoghi esposti a luce alogena o in
spazi aperti.
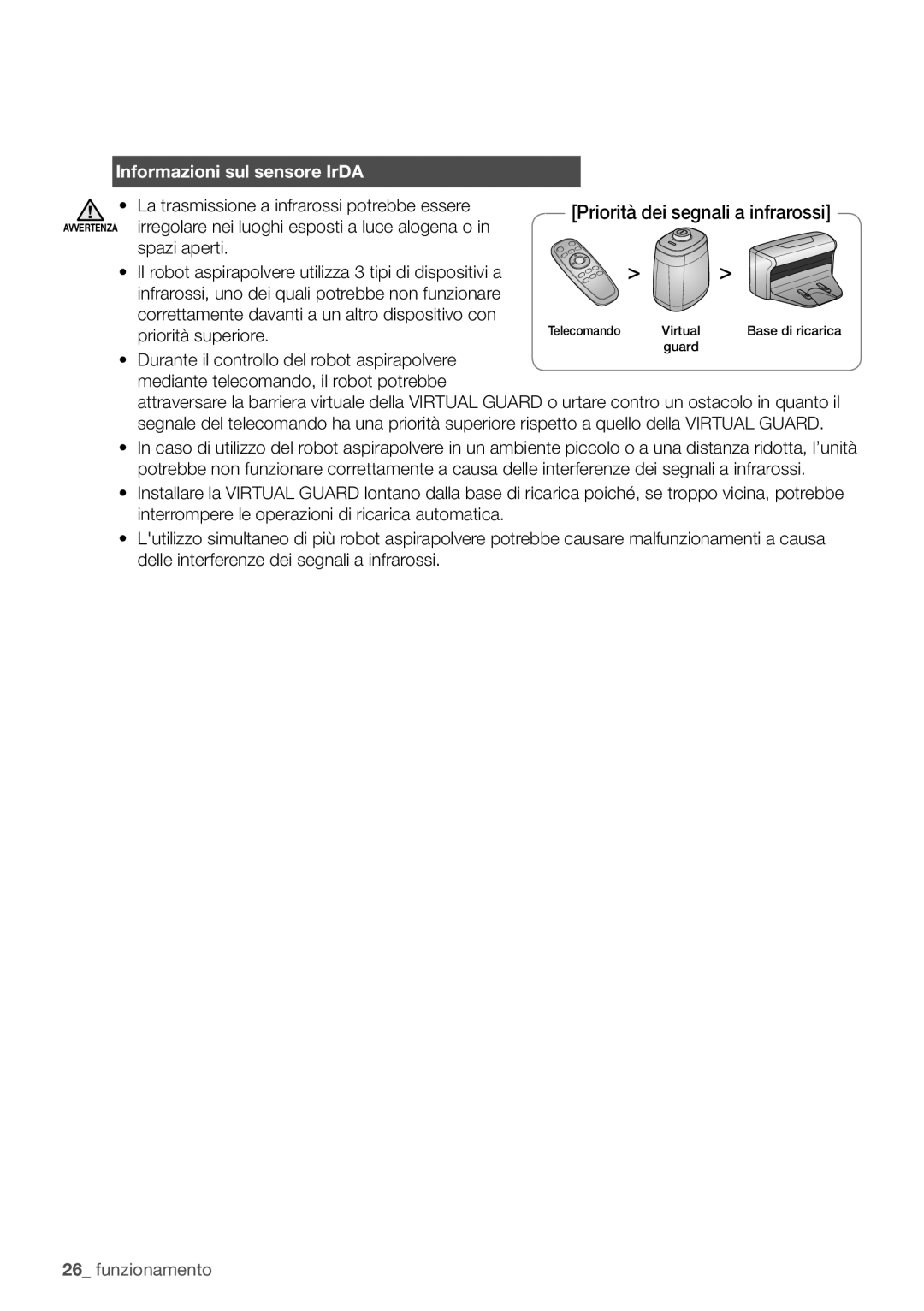
•Il robot aspirapolvere utilizza 3 tipi di dispositivi a infrarossi, uno dei quali potrebbe non funzionare correttamente davanti a un altro dispositivo con priorità superiore.
[Priorità dei segnali
segnali a infrarossi]
a infrarossi]

![]() >
> ![]() >
>
Telecomando | Base di ricarica |
•Durante il controllo del robot aspirapolvere mediante telecomando, il robot potrebbe
attraversare la barriera virtuale della VIRTUAL GUARD o urtare contro un ostacolo in quanto il segnale del telecomando ha una priorità superiore rispetto a quello della VIRTUAL GUARD.
•In caso di utilizzo del robot aspirapolvere in un ambiente piccolo o a una distanza ridotta, l’unità potrebbe non funzionare correttamente a causa delle interferenze dei segnali a infrarossi.
•Installare la VIRTUAL GUARD lontano dalla base di ricarica poiché, se troppo vicina, potrebbe interrompere le operazioni di ricarica automatica.
•L'utilizzo simultaneo di più robot aspirapolvere potrebbe causare malfunzionamenti a causa delle interferenze dei segnali a infrarossi.
26_ funzionamento