INTELLIGENT I/0 MODULES
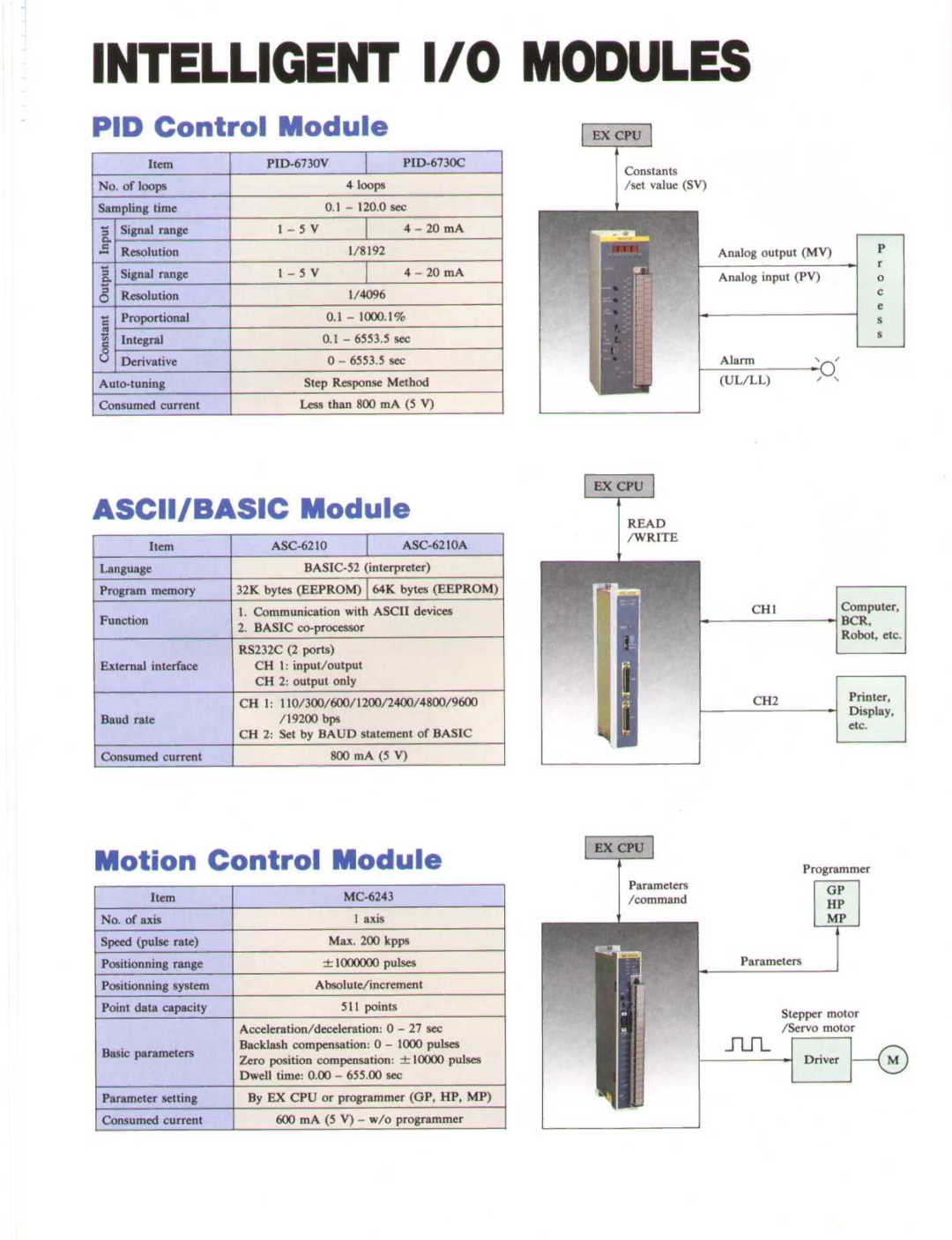
PID Control Module
Item No. of loops Sampling time
7Signal range a Resolution
, Signal range p Resolution
a Proportional c Integral
Derivative
4 loops
0.1- 120 .0 sec
1- 5 V | 4 - 20 mA |
| 1/8192 |
I - 5 V | 4 - 20 mA |
| 1/4096 |
0.1- 1000.1% 0 .1 - 6553 .5 sec 0 - 6553 .5 sec
Step Response Method
Less than 800 mA (5 V)
ASCII/BASIC Module
Item |
| ||
Language |
| ||
Program memory | 32K bytes (EEPROM) | 64K bytes (EEPROM) | |
Function | 1 . Communication with ASCII devices | ||
2 . BASIC |
| ||
|
| ||
External interface | RS232C (2 ports) |
| |
CH | 1: input/output |
| |
| CH | 2: output only |
|
Baud rate | CH 1 : 110/300/600/1200/2400/4800/9600 | ||
| /19200 bps |
| |
| CH 2 : Set by BAUD statement of BASIC | ||
Consumed current |
| 800 mA (5 V) | |
Motion Control Module
Item
No. of axis
Speed (pulse rate) Positionning range Positionning system Point data capacity
Basic parameters
Parameter setting Consumed current
|
| |
I axis |
|
|
Max. 200 kpps |
|
|
± 1000000 pulses |
|
|
Absolute/increment |
|
|
511 points |
|
|
Acceleration/deceleration : 0 - 27 sec |
|
|
Backlash compensation : 0 - 1000 pulses | Driver |
|
Zero position compensation : ± 10000 pulses | \J | |
Dwell time: 0.00 - 655 .00 sec |
| |
|
| |
By EX CPU or programmer (GP, HP, MP) |
|
|
600 mA (5 V) - w/o programmer |
|
|