360° Pattern Matching
| PASS | PASS |
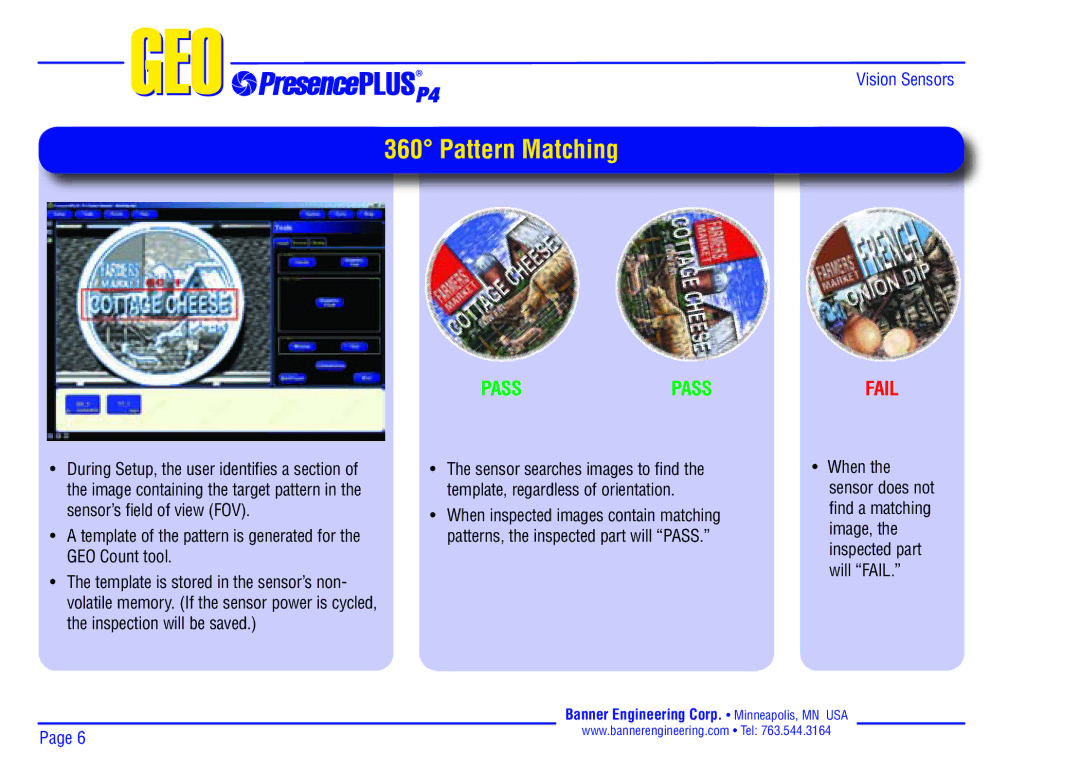
• During Setup, the user identifies a section of | • The sensor searches images to find the | |
the image containing the target pattern in the | template, regardless of orientation. | |
sensor’s field of view (FOV). | • When inspected images contain matching | |
• A template of the pattern is generated for the | patterns, the inspected part will “PASS.” | |
GEO Count tool. |
|
|
•The template is stored in the sensor’s non- volatile memory. (If the sensor power is cycled, the inspection will be saved.)
Vision Sensors
FAIL
•When the sensor does not find a matching image, the inspected part will “FAIL.”
Banner Engineering Corp. • Minneapolis, MN USA
Page 6 | www.bannerengineering.com • Tel: 763.544.3164 |
|