you will install on the transom or inside the hull, and the LCR 400ID unit which you will mount with the supplied gimbal bracket. The transducer and LCR 400ID communicate by means of a cable, and are powered by your boat’s
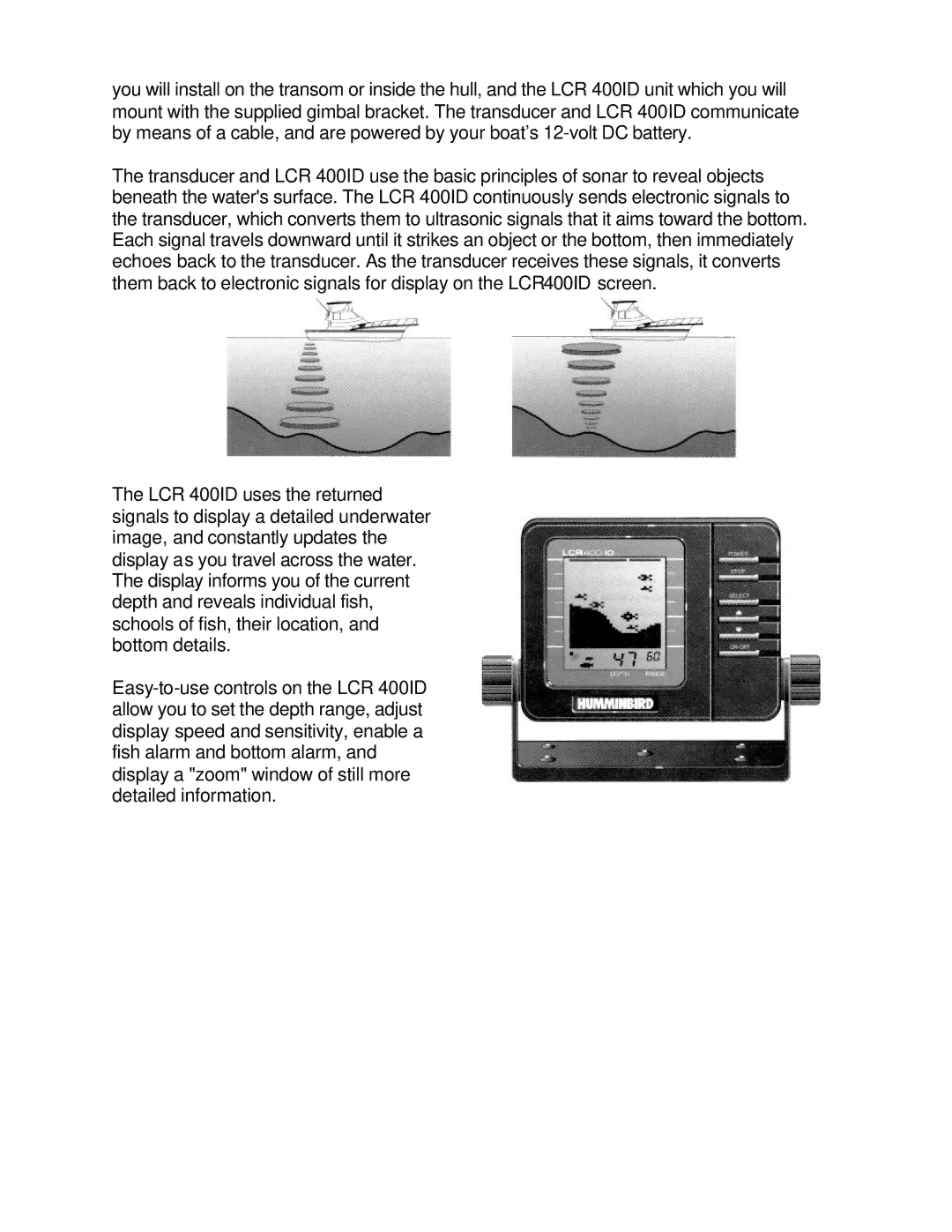
The transducer and LCR 400ID use the basic principles of sonar to reveal objects beneath the water's surface. The LCR 400ID continuously sends electronic signals to the transducer, which converts them to ultrasonic signals that it aims toward the bottom. Each signal travels downward until it strikes an object or the bottom, then immediately echoes back to the transducer. As the transducer receives these signals, it converts them back to electronic signals for display on the LCR400ID screen.
The LCR 400ID uses the returned signals to display a detailed underwater image, and constantly updates the display as you travel across the water. The display informs you of the current depth and reveals individual fish, schools of fish, their location, and bottom details.