At
The transmitted sonar signal travels downward, and is reflected back toward the surface by the bottom or other objects for display on screen.
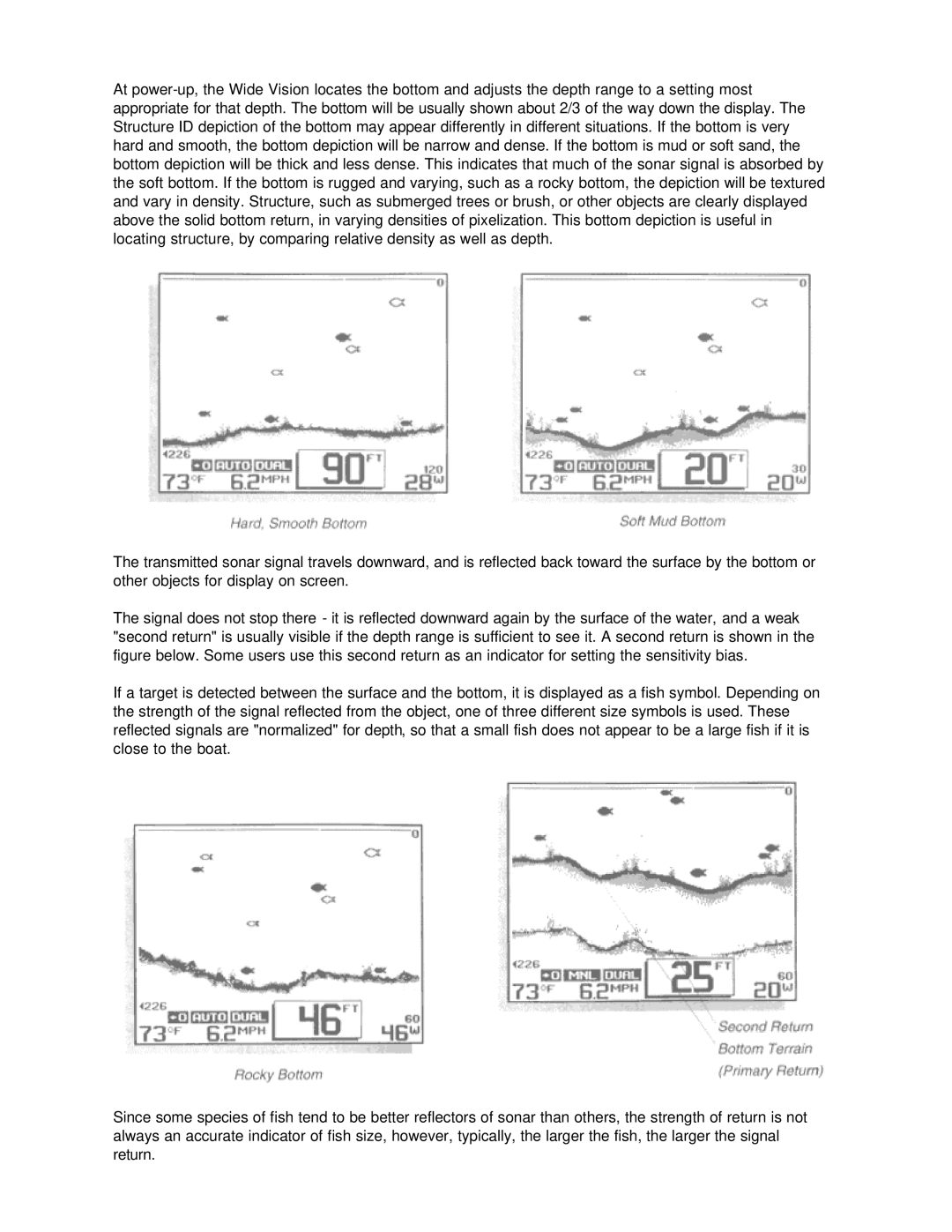
The signal does not stop there - it is reflected downward again by the surface of the water, and a weak "second return" is usually visible if the depth range is sufficient to see it. A second return is shown in the figure below. Some users use this second return as an indicator for setting the sensitivity bias.
If a target is detected between the surface and the bottom, it is displayed as a fish symbol. Depending on the strength of the signal reflected from the object, one of three different size symbols is used. These reflected signals are "normalized" for depth, so that a small fish does not appear to be a large fish if it is close to the boat.
Since some species of fish tend to be better reflectors of sonar than others, the strength of return is not always an accurate indicator of fish size, however, typically, the larger the fish, the larger the signal return.