Cheetah 10K.7 FC
Page
Cheetah 10K.7 FC
Page
Revision Date Sheets Affected
Revision status summary sheet
Rev. a 05/04/05 All. Initial release
Page
Contents
Defect and error management
Physical/electrical specifications
Installation
Interface requirements
Seagate Technology support services
Viii Cheetah 10K.7 36GB FC Product Manual, Rev. a
Cheetah 10K.7 FC family disc drive
List of Figures
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Cheetah 10K.7 FC family disc drive
Scope
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Standards
Applicable standards and reference documentation
Electromagnetic compatibility
Electromagnetic susceptibility
European Union Restriction of Hazardous Substances RoHS
Electromagnetic compliance
Fibre Channel Interface Manual
Reference documents
Cheetah 10K.7 36GB FC Product Manual, Rev. a
General description
Media description
Standard features
Reliability
Performance
Formatted capacities
Programmable drive capacity
User-installed accessories
Factory-installed accessories
Factory-installed options
ST336807FC
Performance characteristics
Internal drive characteristics
Access time
Seek performance characteristics
Format command execution time in minutes
Generalized performance characteristics
Cache operation
Start/stop time
Prefetch/multi-segmented cache control
Caching write data
Prefetch operation
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Recoverable Errors
Reliability specifications
Error rates
Reliability and service
Controlling S.M.A.R.T
Hot plugging the drive
4 S.M.A.R.T
Milliseconds
Performance impact
Reporting control
Determining rate
Drive Self Test DST
Temperature Log page 0Dh
Parameter Code Description
DST Failure Definition
State of the drive prior to testing
Implementation
Invoking DST
Short test Function Code 001b
Product warranty
Extended test Function Code 010b
Log page entries
Product repair and return information
Shipping
AC power requirements
Physical/electrical specifications
DC power requirements
ST336807FC DC power requirements
Conducted noise immunity
General DC power requirement notes
Power sequencing
Typical ST336807FC drive, 2 Gbit, +5V current profile
Typical ST336807FC drive, 2 Gbit, +12V current profile
ST336807FC
Power dissipation
Environmental limits
Temperature
Relative humidity
Effective altitude sea level
Shock
Package size Packaged/product weight Drop height
Shock and vibration
Recommended mounting
Corrosive environment
Air cleanliness
Vibration
Acoustics
Mechanical specifications
Mounting configuration dimensions
Drive error recovery procedures
Defect and error management
Drive internal defects/errors
77.7
Media Pre-Scan
FC-AL system errors
Background Media Scan
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Drive ID/option selection
Installation
Physical interface Drive Front
LED connections
Cooling
1 J6 connector requirements
Drive orientation
Grounding
Drive mounting
Fibre Channel link service frames
FC-AL features
Link services supported
Type of frame Link service
Fibre Channel Scsi FCP task management functions
Fibre Channel task management functions
Fibre Channel task management responses
FC Scsi FCP response codes
Bytes
Fibre Channel port login
NPort login Plogi payload
NPort Login Accept ACC payload
Fibre Channel port login accept
Fibre Channel Process Login
Process Login Plri payload
Process Login Accept ACC payload
Fibre Channel Process Login Accept
Fibre Channel fabric login
Fabric Login Flogi payload
Fabric Login Accept ACC payload
Fibre Channel fabric accept login
Fibre Channel Arbitrated Loop options
Dual port support
FC-AL options supported
Option Supported
Command code Supported Command name
Scsi commands supported
Supported commands
Supported commands
Supported commands
Supported commands
Supported commands
Inquiry data
Mode Sense data
Cheetah 10K.7 FC inquiry data
Bytes Data hex
Page
DEF CHG
Miscellaneous features
Miscellaneous operating features and conditions
Supported Feature or condition
Miscellaneous status
Physical description
Physical characteristics
FC-AL physical interface
Part description Positions Part number Features
Connector requirements
Electrical description
J6 connector dimensions
FC-SCA pin descriptions
Pin Signal name Signal type
Pin descriptions
FC-AL transmitters and receivers
Power
Fault LED Out
Normal command activity LED status
Enable port bypass signals
Active LED Out
Active LED Out conditions
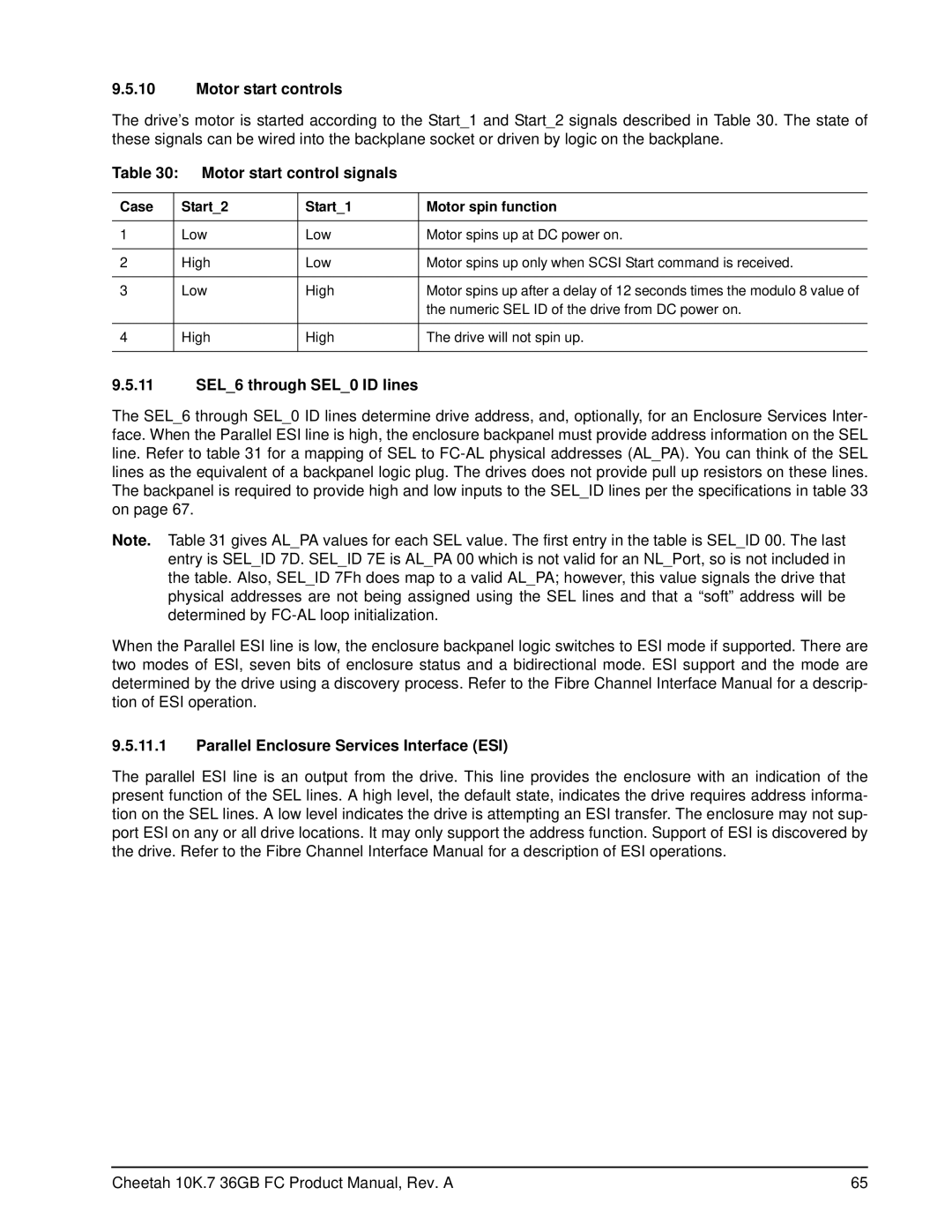
Parallel Enclosure Services Interface ESI
Motor start control signals
Motor start controls
11 SEL6 through SEL0 ID lines
Hex Dec
Setting
Arbitrated loop physical address Alpa values
Signal characteristics
LED drive signal
LED driver signals
Differential Pecl output characteristics
Differential Pecl input characteristics
Link rate GHz
Eye diagram data values
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Internet MySeagate Reseller.seagate.com
Seagate Technology support services
Presales Support
Technical Support
Data Recovery Services
Warranty Service
Data Recovery Services Authorized Service Centers
Toll-free support numbers
FAX services-All Europe toll call
Call center Presales and Technical Support Warranty Service
Asia/Pacific support services
Publication feedback survey
Cheetah 10K.7 36GB FC Product Manual, Rev. a
Numerics
Index
FAN
Flogi
PBC
Page
See also cooling