[ 24 ]
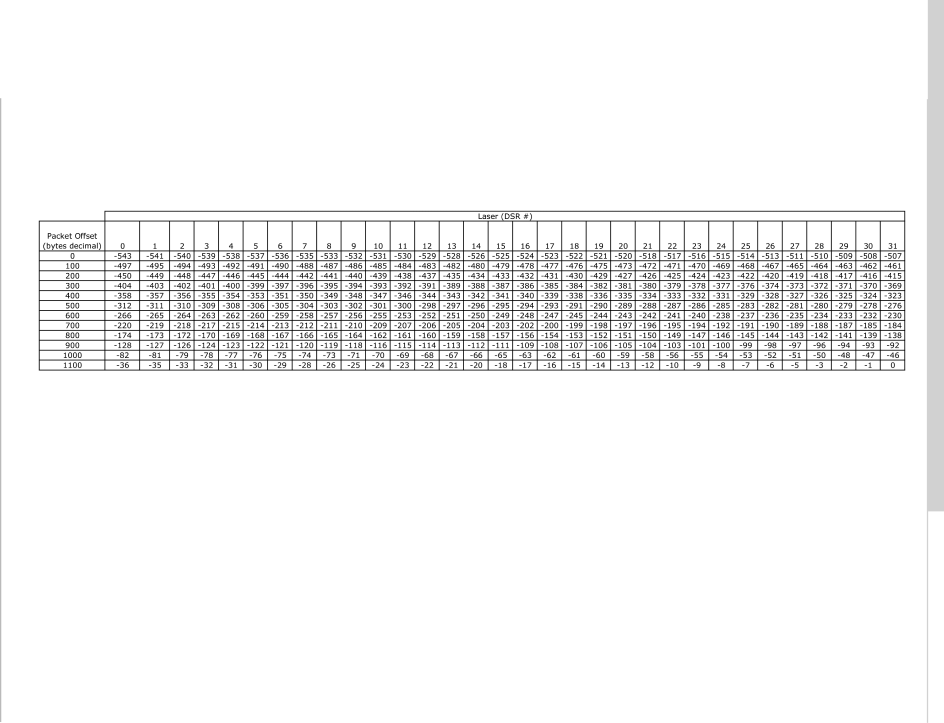
notes: All times in microseconds. Combine the value shown from the packet timestamp (microseconds from the top of the hour), to arrive at actual laser firing time. Rotary encoder value is read at the beginning of packet creatione at actual laser firing time.
Timestamp is recorded and written at end of packet creation.
Formula to determine timing is: