Manuals
/
Emerson
/
Home Audio
/
Satellite Radio
Emerson
Series 3000
manual
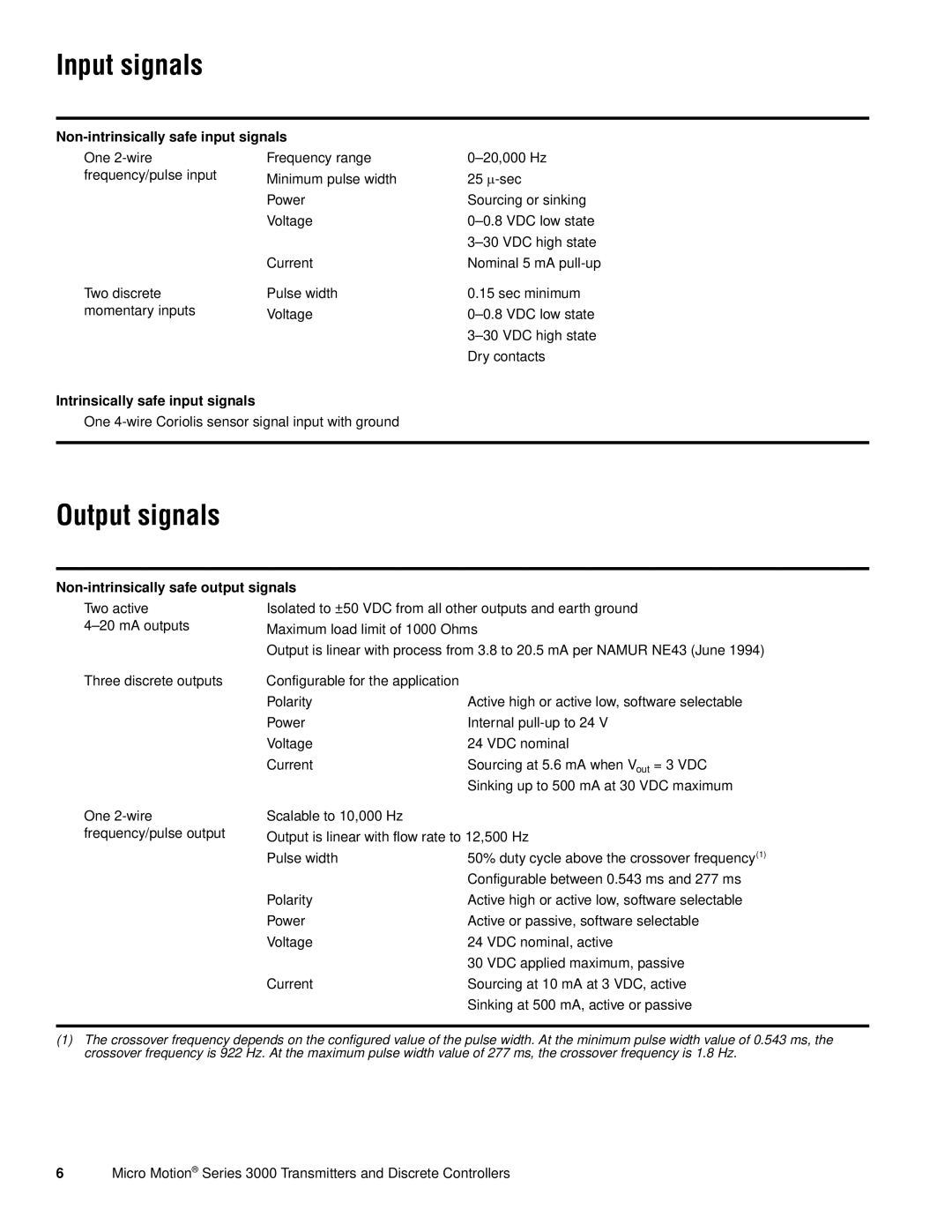
Input signals, Output signals, Non-intrinsicallysafe input signals
Models:
Series 3000
1
6
28
28
Download
28 pages
54.72 Kb
3
4
5
6
7
8
9
10
Specification
Product Data Sheet
Input signals
Fault indication
Dimension
Model 3100 accessory
Weight
Power connection
Housings
Page 6
Image 6
Page 5
Page 7
Page 6
Image 6
Page 5
Page 7
Contents
Product Data Sheet
Large operator interface for easy setup & control
Wide variety of applications
2400S
Micro Motion transmitters and controllers
1700
2500
Contents
Series 3000 transmitters and discrete controllers
Rack-mount
Housings
Applications
Panel-mount
Power connection
Interface/display
Electrical connections
Display
Non-intrinsicallysafe input signals
Input signals
Output signals
Intrinsically safe input signals
Output signals continued
Fault indication
Digital communications
AC power supply
Environmental specifications
Power supply
DC power supply
Hazardous area classifications
UL and CSA
ATEX
Mass flow accuracy12 Volume flow accuracy1
Model 3100 accessory
Model 3500/3700 liquid flow performance
Relays module
Model 3500/3700 gas flow performance
Weight
Model 3500/3700 density performance liquid only
Sensor model
Dimensions in
Dimensions
Rack-mountModel 3300/3500
inches
Dimensions continued
Dimensions in
inches
inches
Dimensions continued
Dimensions in
DIN-rail-mount screw terminals detail
Dimensions in inchesmm
Field-mountModel 3350/3700
Dimensions continued
Conduit openings view
Ordering information - Model
2Available with Chinese M language option only
Code
Ordering information - Model 3300 continued
Code
Code
Ordering information - Model
Model
2Available only with language option M Chinese
Code
Ordering information - Model 3350 continued
Code
Code
Ordering information - Model
Sensor interface code 6 remote core processor
2Available with Chinese M language option only
Code
Ordering information - Model 3500 continued
Code
Code
Sensor interface code 6 remote core processor
Ordering information - Model
Model
2Available only with language option M Chinese
Code
Ordering information - Model 3700 continued
Code
Code
Model
1 Not available with approval code B
Page
Page
Page
Technology leadership
Product breadth
Unparalleled value
Top
Page
Image
Contents