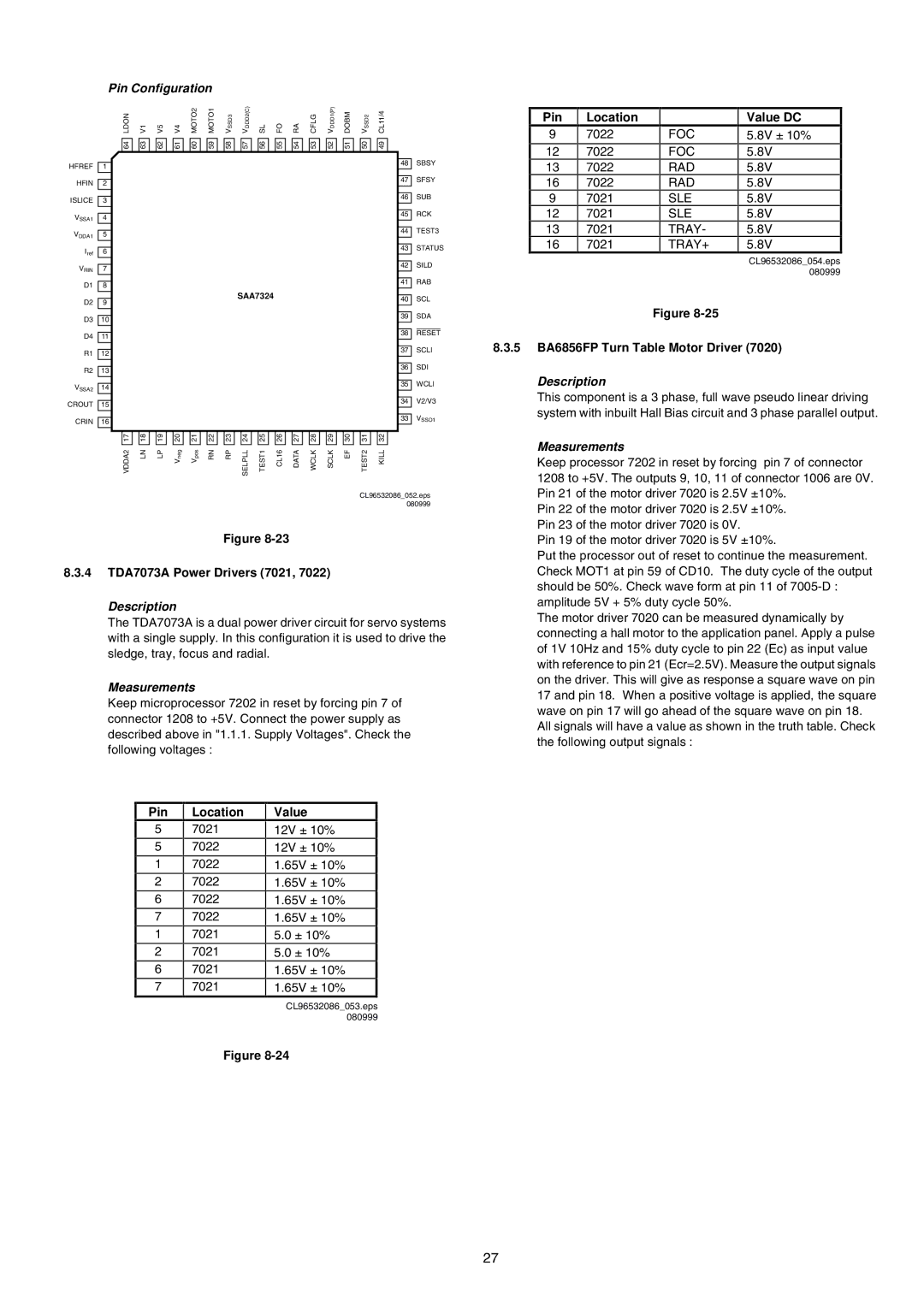
Pin Configuration
64 LDON
HFREF | 1 |
HFIN |
|
2 | |
ISLICE |
|
3 | |
VSSA1 |
|
4 | |
VDDA1 |
|
5 | |
Iref |
|
6 | |
VRIN |
|
7 | |
D1 |
|
8 | |
D2 |
|
9 | |
D3 |
|
10 | |
D4 |
|
11 |
63 V1
62 V5
61 V4
60 MOTO2
59 MOTO1
SSD3 |
| DDD2(C) |
| SL |
| FO |
| RA |
V |
| V |
|
|
| |||
|
|
|
|
|
|
|
|
|
58 |
| 57 |
| 56 |
| 55 |
| 54 |
|
|
|
|
|
|
|
|
|
SAA7324
53 CFLG
52 VDDD1(P)
51 DOBM
50 VSSD2
49 CL11/4
48 |
| SBSY | |
|
| SFSY | |
47 |
| ||
|
| SUB | |
46 |
| ||
|
| RCK | |
45 |
| ||
|
| TEST3 | |
44 |
| ||
|
| STATUS | |
43 |
| ||
|
| SILD | |
42 |
| ||
|
| RAB | |
41 |
| ||
|
| SCL | |
40 |
| ||
|
| SDA | |
39 |
| ||
|
|
|
|
38 |
| RESET |
|
Pin | Location |
|
9 | 7022 | FOC |
12 | 7022 | FOC |
13 | 7022 | RAD |
16 | 7022 | RAD |
9 | 7021 | SLE |
12 | 7021 | SLE |
13 | 7021 | TRAY- |
16 | 7021 | TRAY+ |
Figure
Value DC
5.8V ± 10%
5.8V
5.8V
5.8V
5.8V
5.8V
5.8V
5.8V
CL96532086_054.eps 080999
R1 | 12 |
R2 |
|
13 | |
VSSA2 |
|
14 | |
CROUT |
|
15 | |
CRIN |
|
16 |
37 | SCLI |
| SDI |
36 | |
| WCLI |
35 | |
| V2/V3 |
34 | |
| VSSD1 |
33 |
8.3.5 BA6856FP Turn Table Motor Driver (7020) |
Description |
This component is a 3 phase, full wave pseudo linear driving |
system with inbuilt Hall Bias circuit and 3 phase parallel output. |
VDDA2 17
LN 18
LP 19
Vneg 20
Vpos 21
RN 22
23 |
| 24 |
| 25 |
| 26 |
| 27 |
|
|
|
|
|
|
|
|
|
RP | SELPLL | TEST1 | CL16 | DATA | ||||
28 |
| 29 |
| 30 |
| 31 |
| 32 |
|
|
|
|
|
|
|
|
|
WCLK | SCLK | EF | TEST2 |
| KILL | |||
CL96532086_052.eps 080999
Measurements |
Keep processor 7202 in reset by forcing pin 7 of connector |
1208 to +5V. The outputs 9, 10, 11 of connector 1006 are 0V. |
Pin 21 of the motor driver 7020 is 2.5V ±10%. |
Pin 22 of the motor driver 7020 is 2.5V ±10%. |
Pin 23 of the motor driver 7020 is 0V. |
Figure
8.3.4TDA7073A Power Drivers (7021, 7022)
Description
The TDA7073A is a dual power driver circuit for servo systems with a single supply. In this configuration it is used to drive the sledge, tray, focus and radial.
Measurements
Keep microprocessor 7202 in reset by forcing pin 7 of connector 1208 to +5V. Connect the power supply as described above in "1.1.1. Supply Voltages". Check the following voltages :
Pin 19 of the motor driver 7020 is 5V ±10%. |
Put the processor out of reset to continue the measurement. |
Check MOT1 at pin 59 of CD10. The duty cycle of the output |
should be 50%. Check wave form at pin 11 of |
amplitude 5V + 5% duty cycle 50%. |
The motor driver 7020 can be measured dynamically by |
connecting a hall motor to the application panel. Apply a pulse |
of 1V 10Hz and 15% duty cycle to pin 22 (Ec) as input value |
with reference to pin 21 (Ecr=2.5V). Measure the output signals |
on the driver. This will give as response a square wave on pin |
17 and pin 18. When a positive voltage is applied, the square |
wave on pin 17 will go ahead of the square wave on pin 18. |
All signals will have a value as shown in the truth table. Check |
the following output signals : |
Pin
5
5
1
2
6
7
1
2
6
7
Location
7021
7022
7022
7022
7022
7022
7021
7021
7021
7021
Value
12V ± 10%
12V ± 10%
1.65V ± 10%
1.65V ± 10%
1.65V ± 10%
1.65V ± 10%
5.0± 10%
5.0± 10% 1.65V ± 10% 1.65V ± 10%
CL96532086_053.eps 080999
Figure
27