Funzionamento dell’aspirapolvere
USO DEL ROBOT ASPIRAPOLVERE
Pulizia bordi
Quando il Sensore ostacoli rileva un ostacolo durante la pulizia, il robot riduce la velocità per attenuare l’impatto e il Sensore paracolpi consente a sua volta di attutire ulteriormente l’urto.. Inoltre, il robot riesce ad effettuare una pulizia accurata avvicinandosi il più possibile a bordi e angoli. (Questo robot aspirapolvere
èdotato di sistema touch sensor per la rilevazione degli ostacoli e la pulizia.)
Il robot aspirapolvere si muove autonomamente ed esegue la pulizia automatica della casa fino al suo completamento.
■ Se le operazioni di pulizia hanno inizio quando il robot è inserito nella base di ricarica, il tempo necessario per ritornarvi sarà minore poiché il robot aspirapolvere memorizza la posizione originale durante il suo movimento.
■ Se il livello di carica delle batterie è molto basso durante le operazioni di pulizia, il robot aspirapolvere tornerà automaticamente alla base di ricarica per poi riprendere la
pulizia una volta ricaricate le batterie. (Numero di operazioni di pulizia riprese: una)
dellF 03unzionamento![]()
’aspirapolvere
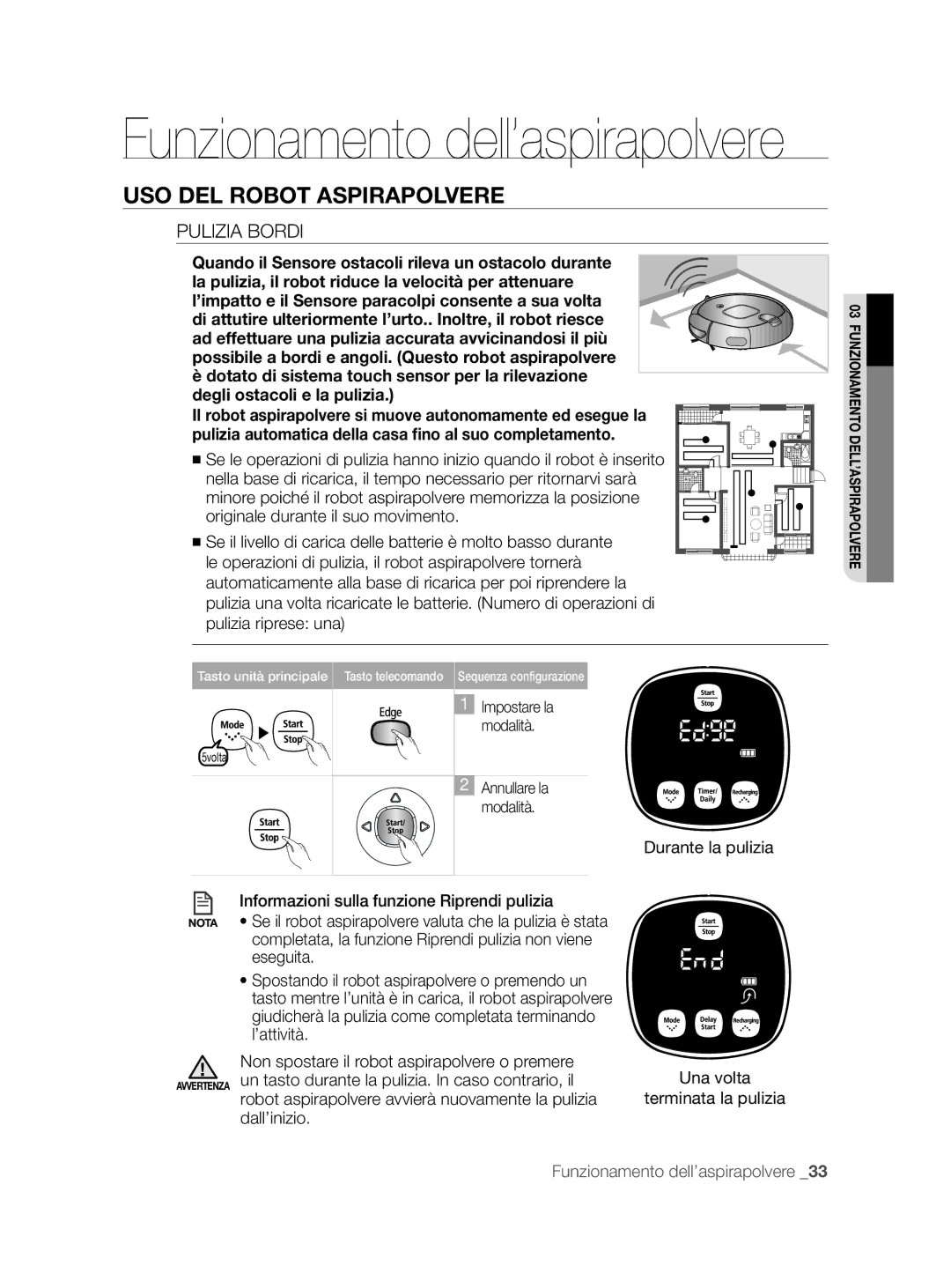
Tasto unità principale Tasto telecomando Sequenza configurazione
1 | Impostare la |
▶ | modalità. |
| |
5volta |
|
2 | Annullare la |
| modalità. |
Informazioni sulla funzione Riprendi pulizia
NOTA • Se il robot aspirapolvere valuta che la pulizia è stata completata, la funzione Riprendi pulizia non viene eseguita.
•Spostando il robot aspirapolvere o premendo un tasto mentre l’unità è in carica, il robot aspirapolvere giudicherà la pulizia come completata terminando l’attività.
Non spostare il robot aspirapolvere o premere AVVERTENZA un tasto durante la pulizia. In caso contrario, il
robot aspirapolvere avvierà nuovamente la pulizia dall’inizio.
Durante la pulizia
Una volta
terminata la pulizia
Funzionamento dell’aspirapolvere _33