GTR64 | http://www.matrix.es/GTR64 |
Clock synchronization can be used as a handshaking mechanism, to enable receivers to cope with fast data transfers. On a byte level, a slave (host
The I2C interface supports
.
Parameter | Min | Typ | Max | Unit |
SCL clock frequency | 0 |
| 400 | kHz |
|
|
|
|
|
LOW period of the SCL clock | 1.3 |
|
| μs |
HIGH period of the SCL clock | 0.6 |
|
| μs |
|
|
|
|
|
Data hold time | 0 |
| 0.9 | μs |
Capacitive load for each bus line |
|
| 400 | pF |
3.7.3. SPI Bus
SPI: The implementation of SPI uses the same command structure as the AT command AT*E2SPI. The current implementation of this function only supports SPI Mode 0 (data is latched on a rising clock edge and the default state of the clock is low).
4 wires are used - CLOCK (IO1 pin), DATA INPUT (IO2 pin), DATA OUTPUT (IO3 pin), and SYNC (RI pin).
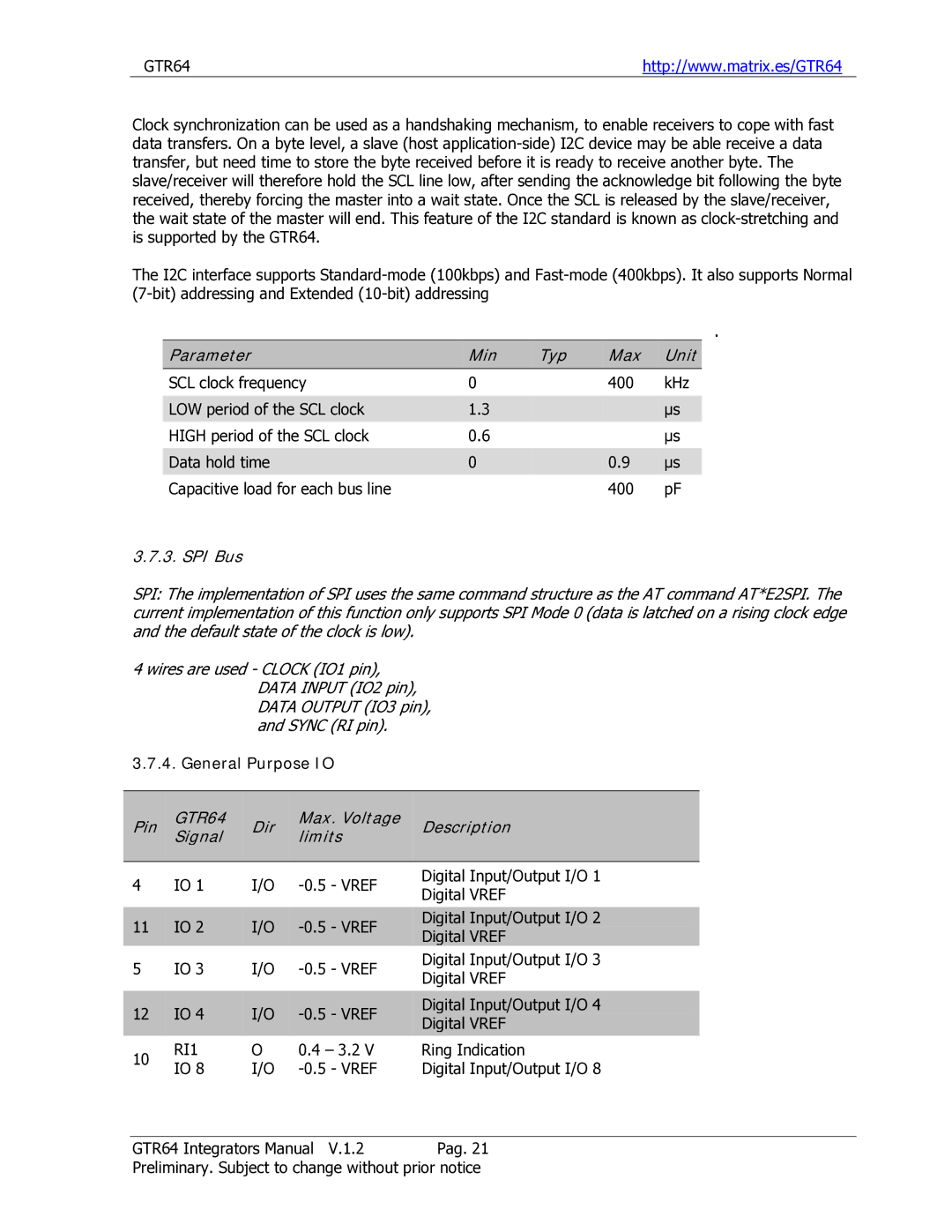
3.7.4. General Purpose IO
| Pin |
| GTR64 |
| Dir |
| Max. Voltage |
| Description |
|
|
|
| Signal |
|
|
| limits |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 4 |
| IO 1 |
| I/O |
|
| Digital Input/Output I/O 1 |
| |
|
|
|
|
| Digital VREF |
| ||||
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
| 11 |
| IO 2 |
| I/O |
|
| Digital Input/Output I/O 2 |
| |
|
|
|
|
| Digital VREF |
| ||||
|
|
|
|
|
|
|
|
|
| |
| 5 |
| IO 3 |
| I/O |
|
| Digital Input/Output I/O 3 |
| |
|
|
|
|
| Digital VREF |
| ||||
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
| 12 |
| IO 4 |
| I/O |
|
| Digital Input/Output I/O 4 |
| |
|
|
|
|
| Digital VREF |
| ||||
|
|
|
|
|
|
|
|
|
| |
| 10 |
| RI1 |
| O |
| 0.4 – 3.2 V |
| Ring Indication |
|
|
| IO 8 |
| I/O |
|
| Digital Input/Output I/O 8 |
| ||
|
|
|
|
|
|
|
GTR64 Integrators Manual V.1.2 Pag. 21
Preliminary. Subject to change without prior notice