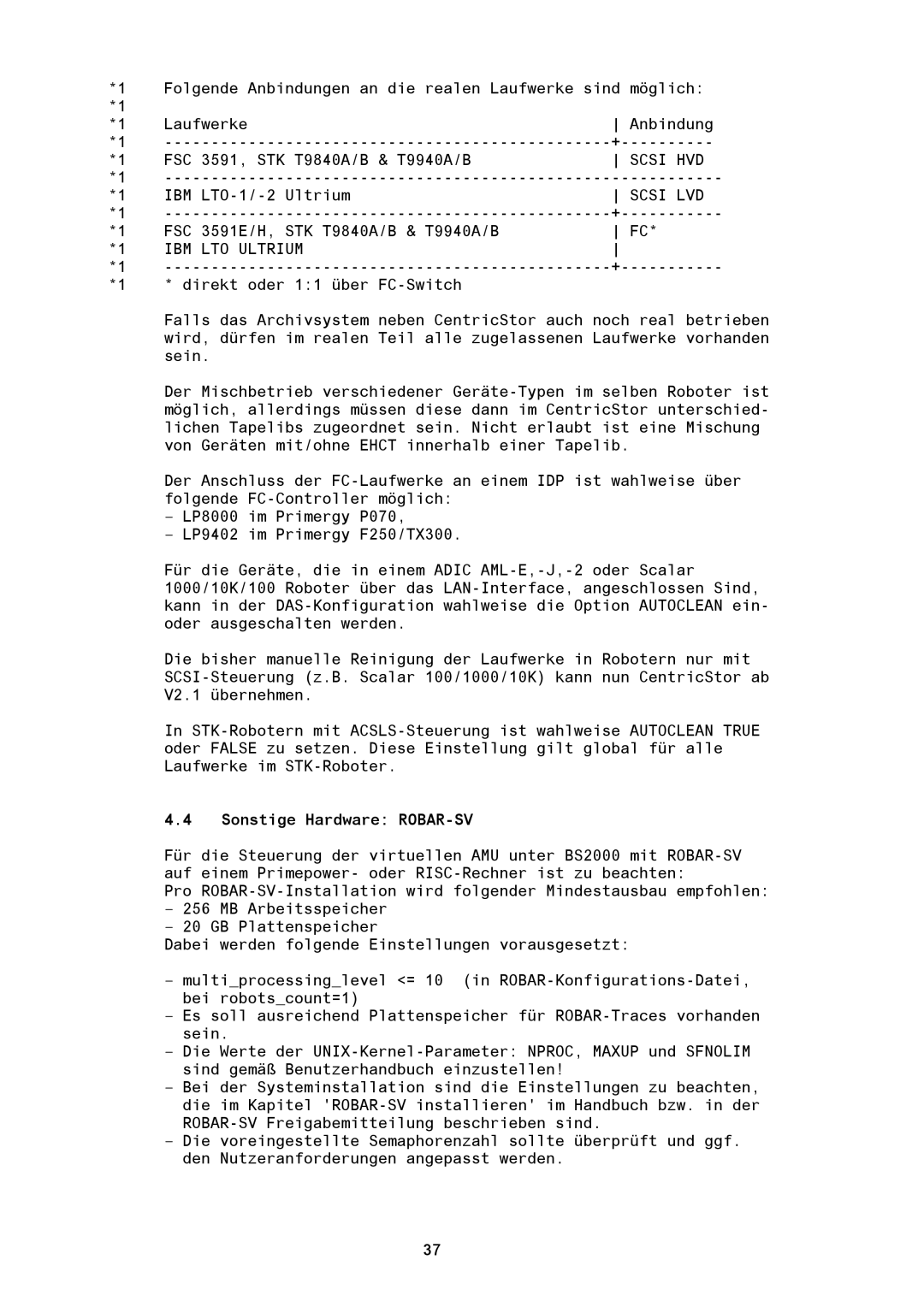
*1 | Folgende Anbindungen an die realen Laufwerke sind möglich: |
*1 | | |
*1 | Laufwerke | Anbindung |
*1 | ------------------------------------------------ | +---------- |
*1 | FSC 3591, STK T9840A/B & T9940A/B | SCSI HVD |
*1 | ------------------------------------------------------------ |
*1 | IBM LTO-1/-2 Ultrium | SCSI LVD |
*1 | ------------------------------------------------ | +----------- |
*1 | FSC 3591E/H, STK T9840A/B & T9940A/B | FC* |
*1 | IBM LTO ULTRIUM | |
*1 | ------------------------------------------------ | +----------- |
*1 | * direkt oder 1:1 über FC-Switch | |
Falls das Archivsystem neben CentricStor auch noch real betrieben wird, dürfen im realen Teil alle zugelassenen Laufwerke vorhanden sein.
Der Mischbetrieb verschiedener Geräte-Typen im selben Roboter ist möglich, allerdings müssen diese dann im CentricStor unterschied- lichen Tapelibs zugeordnet sein. Nicht erlaubt ist eine Mischung von Geräten mit/ohne EHCT innerhalb einer Tapelib.
Der Anschluss der FC-Laufwerke an einem IDP ist wahlweise über folgende FC-Controller möglich:
-LP8000 im Primergy P070,
-LP9402 im Primergy F250/TX300.
Für die Geräte, die in einem ADIC AML-E,-J,-2 oder Scalar 1000/10K/100 Roboter über das LAN-Interface, angeschlossen Sind, kann in der DAS-Konfiguration wahlweise die Option AUTOCLEAN ein- oder ausgeschalten werden.
Die bisher manuelle Reinigung der Laufwerke in Robotern nur mit SCSI-Steuerung (z.B. Scalar 100/1000/10K) kann nun CentricStor ab V2.1 übernehmen.
In STK-Robotern mit ACSLS-Steuerung ist wahlweise AUTOCLEAN TRUE oder FALSE zu setzen. Diese Einstellung gilt global für alle Laufwerke im STK-Roboter.
4.4Sonstige Hardware: ROBAR-SV
Für die Steuerung der virtuellen AMU unter BS2000 mit ROBAR-SV auf einem Primepower- oder RISC-Rechner ist zu beachten:
Pro ROBAR-SV-Installation wird folgender Mindestausbau empfohlen:
-256 MB Arbeitsspeicher
-20 GB Plattenspeicher
Dabei werden folgende Einstellungen vorausgesetzt:
-multi_processing_level <= 10 (in ROBAR-Konfigurations-Datei, bei robots_count=1)
-Es soll ausreichend Plattenspeicher für ROBAR-Traces vorhanden sein.
-Die Werte der UNIX-Kernel-Parameter: NPROC, MAXUP und SFNOLIM sind gemäß Benutzerhandbuch einzustellen!
-Bei der Systeminstallation sind die Einstellungen zu beachten, die im Kapitel 'ROBAR-SV installieren' im Handbuch bzw. in der ROBAR-SV Freigabemitteilung beschrieben sind.
-Die voreingestellte Semaphorenzahl sollte überprüft und ggf. den Nutzeranforderungen angepasst werden.