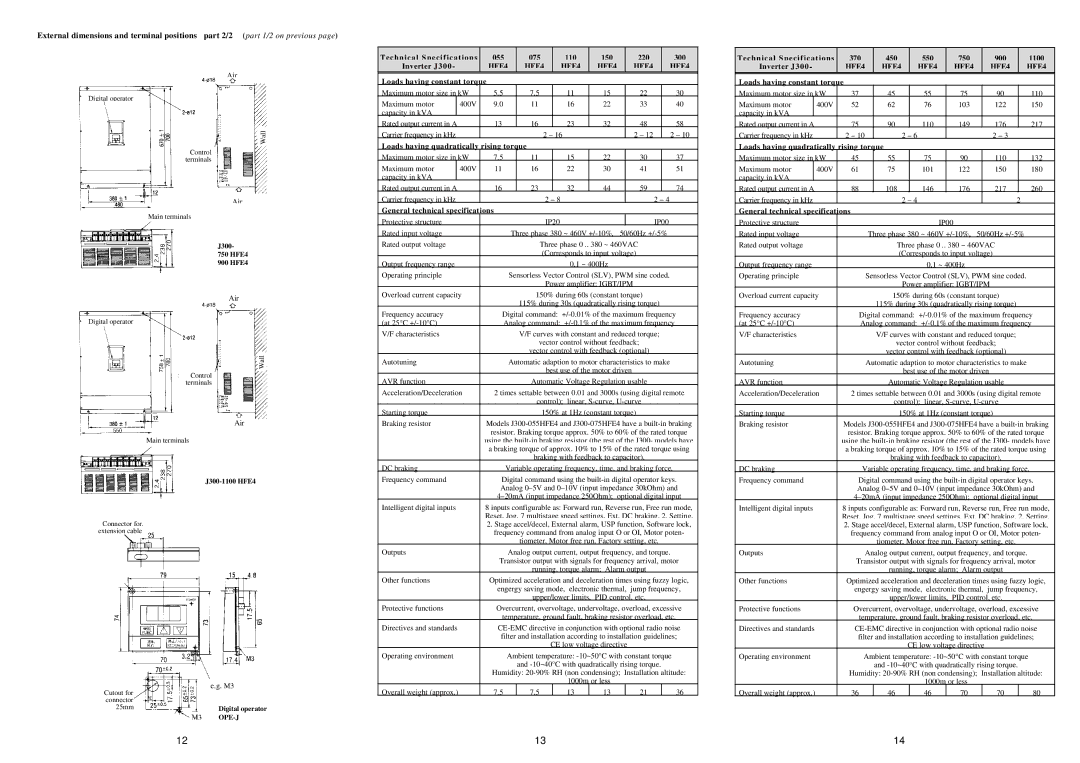
External dimensions and terminal positions part 2/2 (part 1/2 on previous page)
Air
Digital operator
Wall
Control terminals
Air
Main terminals
J300-
750 HFE4
900 HFE4
Air
Digital operator
Wall
Control terminals
Air
Main terminals
Connector for extension cable
|
| e.g. |
|
Cutout for |
|
|
|
|
|
| |
connector |
|
|
|
25mm |
| Digital operator | |
|
| ||
| |||
Tec hn i c al S pe ci f i c at i on s | 055 |
| 075 |
| 110 | 150 |
| 220 |
| 300 | ||
Inverter J300 - |
| HFE4 |
| HFE4 |
| HFE4 | HFE4 |
| HFE4 |
| HFE4 | |
Loads having constant torque |
|
|
|
|
|
|
|
|
| |||
Maximum motor size in kW | 5.5 |
| 7.5 |
| 11 | 15 |
| 22 |
| 30 | ||
Maximum motor |
| 400V | 9.0 |
| 11 |
| 16 | 22 |
| 33 |
| 40 |
capacity in kVA |
|
|
|
|
|
|
|
|
|
|
|
|
Rated output current in A |
| 13 |
| 16 |
| 23 | 32 |
| 48 |
| 58 | |
Carrier frequency in kHz |
|
|
| 2 – 16 |
|
| 2 – 12 |
| 2 – 10 | |||
Loads having quadratically rising torque |
|
|
|
|
|
|
| |||||
Maximum motor size in kW | 7.5 |
| 11 |
| 15 | 22 |
| 30 |
| 37 | ||
Maximum motor |
| 400V | 11 |
| 16 |
| 22 | 30 |
| 41 |
| 51 |
capacity in kVA |
|
|
|
|
|
|
|
|
|
|
|
|
Rated output current in A |
| 16 |
| 23 |
| 32 | 44 |
| 59 |
| 74 | |
Carrier frequency in kHz |
|
|
|
| 2 – 8 |
|
| 2 – 4 |
| |||
General technical specifications |
|
|
|
|
|
|
|
|
| |||
Protective structure |
|
|
|
| IP20 |
|
| IP00 | ||||
Rated input voltage |
|
| Three phase 380 ~ 460V | 50/60Hz | ||||||||
Rated output voltage |
|
|
| Three phase 0 .. 380 ~ 460VAC |
| |||||||
|
|
|
|
| (Corresponds to input voltage) |
| ||||||
Output frequency range |
|
|
|
|
| 0,1 ~ 400Hz |
|
|
|
| ||
Operating principle |
|
| Sensorless Vector Control (SLV), PWM sine coded. | |||||||||
|
|
|
|
|
| Power amplifier: IGBT/IPM |
| |||||
Overload current capacity |
|
| 150% during 60s (constant torque) |
| ||||||||
|
|
|
|
| 115% during 30s (quadratically rising torque) |
| ||||||
Frequency accuracy |
| Digital command: | ||||||||||
(at 25°C |
| Analog command: | ||||||||||
V/F characteristics |
|
|
| V/F curves with constant and reduced torque; |
| |||||||
|
|
|
|
| vector control without feedback; |
| ||||||
|
|
|
|
| vector control with feedback (optional) |
| ||||||
Autotuning |
|
| Automatic adaption to motor characteristics to make | |||||||||
|
|
|
|
|
| best use of the motor driven |
| |||||
AVR function |
|
|
| Automatic Voltage Regulation usable |
| |||||||
Acceleration/Deceleration | 2 times settable between 0.01 and 3000s (using digital remote | |||||||||||
|
|
|
|
| control); linear, |
| ||||||
Starting torque |
|
|
| 150% at 1Hz (constant torque) |
| |||||||
Braking resistor |
| Models | ||||||||||
|
|
| resistor. Braking torque approx. 50% to 60% of the rated torque | |||||||||
|
|
| using the | |||||||||
|
|
| a braking torque of approx. 10% to 15% of the rated torque using | |||||||||
|
|
|
|
| braking with feedback to capacitor). |
| ||||||
DC braking |
| Variable operating frequency, time, and braking force. | ||||||||||
Frequency command |
| Digital command using the | ||||||||||
|
|
| Analog | |||||||||
|
|
| ||||||||||
Intelligent digital inputs |
| 8 inputs configurable as: Forward run, Reverse run, Free run mode, | ||||||||||
|
|
| Reset, Jog, 7 multistage speed settings, Ext. DC braking, 2. Setting, | |||||||||
2.Stage accel/decel, External alarm, USP function, Software lock, frequency command from analog input O or OI, Motor poten-
tiometer, Motor free run, Factory setting, etc.
Outputs |
| Analog output current, output frequency, and torque. |
| ||||||||
| Transistor output with signals for frequency arrival, motor | ||||||||||
|
|
| running, torque alarm; Alarm output |
| |||||||
Other functions | Optimized acceleration and deceleration times using fuzzy logic, | ||||||||||
| engergy saving mode, | electronic thermal, | jump frequency, | ||||||||
|
|
| upper/lower limits, | PID control, etc. |
| ||||||
Protective functions | Overcurrent, overvoltage, undervoltage, overload, excessive | ||||||||||
| temperature, ground fault, braking resistor overload, etc. |
| |||||||||
Directives and standards | |||||||||||
| filter and installation according to installation guidelines; | ||||||||||
|
|
| CE low voltage directive |
|
|
| |||||
Operating environment |
| Ambient temperature: |
| ||||||||
|
|
| and |
| |||||||
| Humidity: | ||||||||||
|
|
|
|
| 1000m or less |
|
|
| |||
Overall weight (approx.) | 7.5 |
| 7.5 |
| 13 |
| 13 |
| 21 |
| 36 |
T ec h n ic a l S p e ci f ic a t io n s | 370 |
| 450 |
| 550 |
| 750 |
| 900 |
| 1100 | ||
Inverter J300 - |
| HFE4 |
| HFE4 |
| HFE4 |
| HFE4 |
| HFE4 |
| HFE4 | |
Loads having constant torque |
|
|
|
|
|
|
|
|
|
| |||
Maximum motor size in kW | 37 |
| 45 |
| 55 |
| 75 |
| 90 |
| 110 | ||
Maximum motor |
| 400V | 52 |
| 62 |
| 76 |
| 103 |
| 122 |
| 150 |
capacity in kVA |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rated output current in A |
| 75 |
| 90 |
| 110 |
| 149 |
| 176 |
| 217 | |
Carrier frequency in kHz |
| 2 – 10 |
| 2 – 6 |
|
|
| 2 – 3 |
| ||||
Loads having quadratically | rising torque |
|
|
|
|
|
|
|
| ||||
Maximum motor size in kW | 45 |
| 55 |
| 75 |
| 90 |
| 110 |
| 132 | ||
Maximum motor |
| 400V | 61 |
| 75 |
| 101 |
| 122 |
| 150 |
| 180 |
capacity in kVA |
|
|
|
|
|
|
|
|
|
|
|
|
|
Rated output current in A |
| 88 |
| 108 |
| 146 |
| 176 |
| 217 |
| 260 | |
Carrier frequency in kHz |
|
|
|
| 2 – 4 |
|
|
| 2 |
|
| ||
General technical specifications |
|
|
|
|
|
|
|
|
|
| |||
Protective structure |
|
|
|
|
|
| IP00 |
|
|
|
| ||
Rated input voltage |
|
| Three phase 380 ~ 460V | 50/60Hz |
| ||||||||
Rated output voltage |
|
|
| Three phase 0 .. 380 ~ 460VAC |
| ||||||||
|
|
|
|
| (Corresponds to input voltage) |
| |||||||
Output frequency range |
|
|
|
|
| 0,1 ~ 400Hz |
|
|
|
| |||
Operating principle |
|
| Sensorless Vector Control (SLV), PWM sine coded. |
| |||||||||
|
|
|
|
|
| Power amplifier: IGBT/IPM |
| ||||||
Overload current capacity |
|
| 150% during 60s (constant torque) |
| |||||||||
|
|
|
|
| 115% during 30s (quadratically rising torque) |
| |||||||
Frequency accuracy |
| Digital command: | |||||||||||
(at 25°C |
| Analog command: | |||||||||||
V/F characteristics |
|
|
| V/F curves with constant and reduced torque; |
| ||||||||
|
|
|
|
| vector control without feedback; |
| |||||||
|
|
|
|
| vector control with feedback (optional) |
| |||||||
Autotuning |
|
| Automatic adaption to motor characteristics to make |
| |||||||||
|
|
|
|
|
| best use of the motor driven |
| ||||||
AVR function |
|
|
| Automatic Voltage Regulation usable |
| ||||||||
Acceleration/Deceleration | 2 times settable between 0.01 and 3000s (using digital remote | ||||||||||||
|
|
|
|
| control); linear, |
| |||||||
Starting torque |
|
|
| 150% at 1Hz (constant torque) |
| ||||||||
Braking resistor |
| Models | |||||||||||
|
|
| resistor. Braking torque approx. 50% to 60% of the rated torque | ||||||||||
|
|
| using the | ||||||||||
|
|
| a braking torque of approx. 10% to 15% of the rated torque using | ||||||||||
|
|
|
|
| braking with feedback to capacitor). |
| |||||||
DC braking |
| Variable operating frequency, time, and braking force. | |||||||||||
Frequency command |
| Digital command using the | |||||||||||
|
|
| Analog | ||||||||||
|
|
| |||||||||||
Intelligent digital inputs |
| 8 inputs configurable as: Forward run, Reverse run, Free run mode, | |||||||||||
|
|
| Reset, Jog, 7 multistage speed settings, Ext. DC braking, 2. Setting, | ||||||||||
2.Stage accel/decel, External alarm, USP function, Software lock, frequency command from analog input O or OI, Motor poten-
tiometer, Motor free run, Factory setting, etc.
Outputs |
| Analog output current, output frequency, and torque. |
| ||||||||
| Transistor output with signals for frequency arrival, motor | ||||||||||
|
|
| running, torque alarm; Alarm output |
| |||||||
Other functions | Optimized acceleration and deceleration times using fuzzy logic, | ||||||||||
| engergy saving mode, | electronic thermal, | jump frequency, | ||||||||
|
|
| upper/lower limits, | PID control, etc. |
| ||||||
Protective functions | Overcurrent, overvoltage, undervoltage, overload, excessive | ||||||||||
|
| temperature, ground fault, braking resistor overload, etc. |
| ||||||||
Directives and standards | |||||||||||
| filter and installation according to installation guidelines; | ||||||||||
|
|
| CE low voltage directive |
|
|
| |||||
Operating environment |
| Ambient temperature: |
| ||||||||
|
|
| and |
| |||||||
| Humidity: | ||||||||||
|
|
|
|
| 1000m or less |
|
|
| |||
Overall weight (approx.) | 36 |
| 46 |
| 46 |
| 70 |
| 70 |
| 80 |
12 | 13 | 14 |