Wave action also affects the bottom depiction. The information drawn is a distance measurement, so if the boat is moving up and down over flat bottom, the bottom depiction often appears in regular variations that match wave timing.
Structure. Structure is defined as any object physically attached to the bottom. The sonar configuration of the 300TX is optimized to give the most accurate depiction of bottom structure possible. Grass, trees, stumps, wrecks or other debris are accurately displayed, however the depiction of these objects varies with boat speed and direction. The best way to learn to interpret structure is to operate the 300TX over a variety of known conditions and experiment with user functions to best represent those conditions
Surface Clutter. Surface clutter is the layer of water near the surface that is rich in algae and other growth, and often is aerated by wind or wave action. This area of water interferes with sonar transmission and often appears
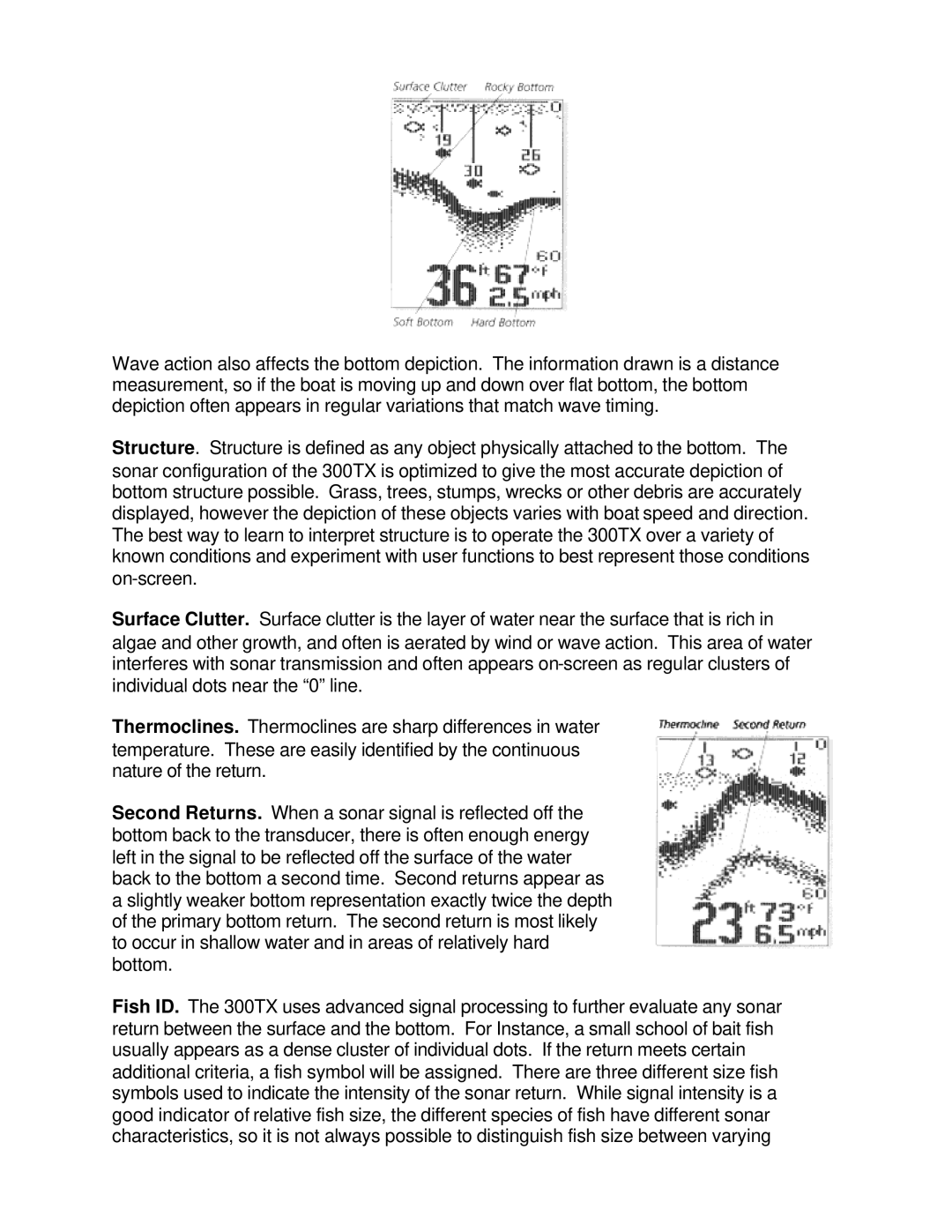
Thermoclines. Thermoclines are sharp differences in water temperature. These are easily identified by the continuous nature of the return.
Second Returns. When a sonar signal is reflected off the bottom back to the transducer, there is often enough energy left in the signal to be reflected off the surface of the water back to the bottom a second time. Second returns appear as a slightly weaker bottom representation exactly twice the depth of the primary bottom return. The second return is most likely to occur in shallow water and in areas of relatively hard bottom.
Fish ID. The 300TX uses advanced signal processing to further evaluate any sonar return between the surface and the bottom. For Instance, a small school of bait fish usually appears as a dense cluster of individual dots. If the return meets certain additional criteria, a fish symbol will be assigned. There are three different size fish symbols used to indicate the intensity of the sonar return. While signal intensity is a good indicator of relative fish size, the different species of fish have different sonar characteristics, so it is not always possible to distinguish fish size between varying