Page
Thank You
Table of Contents
Menu System Start-Up Options Menu
Sonar Menu Tab
Setup Menu Tab
Views Menu Tab
How Sonar Works
Series Introduction
High Definition Side Imaging Sonar
Peak to Peak measures power output at the highest points
DualBeam Plus Sonar
QuadraBeam Plus Sonar
Optional-purchase QuadraBeam Plus transducer only
How GPS and Cartography Work
Universal Sonar
Multi-Media Card MMC/SD Slot
Software Updates
Accessory Bus
Installation Overview
900 Series has a wide variety of configurations
Gimbal Mounting the Control Head
Control Head Installation
Basic installation tasks that you must perform include
Installing the GPS Receiver if included
Page
Mounting Screws
Cables Routed Behind Mounting Bracket
Cables Routed Directly Beneath Mounting Bracket
Back of Control Head
Connecting the Control Head Power Cable to the Boat
Transducer Position
Transducer Installation
Areas of Possible Turbulence
Transom Transducer Installation
To mount the transducer bracket to the boat
Attaching the Bracket
To attach the pivot to the transducer
Normal Cavitation
To mount the transducer pivot assembly to the bracket
Tighten the Mounting Screws
To route the transom transducer cable
Trolling Motor Transducer Installation
Trolling Motor Transducer Options
Hole Escutcheon Plate Cable Clamp
Hand-tighten only
Test and Finish the Transducer Installation
That hardware to mount the stem antenna pole
GPS Receiver Installation
Stem Mounting with an Existing 1 14 Thread Stem
Follow these steps to stem mount the GPS receiver
Access Under Mounting Location
No Access Under Mounting Location
Access Under Mounting Location
Finish Routing the Cable Check GPS Receiver Operation
To test the installation
Testing the System Installation
Powering Up the Control Head
Getting Started Using Your 900 Series
Triplog
What’s On the Sonar Display
Real Time Sonar RTS Window
Understanding Sonar History
Sonar Bottom Presentation
KHz provides highest resolution with 130 total beam width
Understanding Side Imaging
KHz provides maximum coverage with 180 total beam width
Triplog
What’s on the Side Imaging Display
Side Imaging Technology How it works
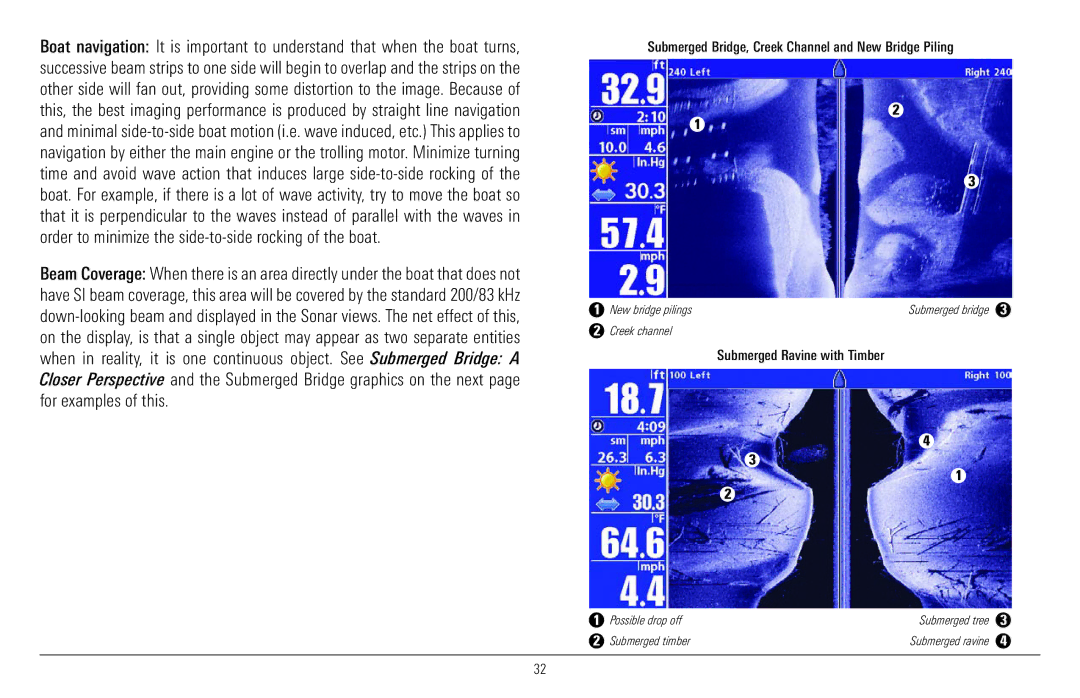
Side Imaging On the water Interpretation
Side Imaging Representation
Submerged Ravine with Timber
Submerged Bridge a Closer Perspective
POWER/LIGHT Key
Key Functions
Submerged Barge with Dumped Logs
Menu Key
View Key
View Preset keys
WAY Cursor Control Key
Exit Key
Goto Key has multiple functions, depending on the situation
Info Key
Mark Key
Goto Key
Views
Zoom +/- Key
Views and Readouts
Side Imaging View
Side Imaging View
Sonar View
Sonar View
Sonar Zoom View
Sonar Zoom View
Split Sonar View
Split Sonar View
Side/Sonar Combo View
Side/Sonar Combo View
Snapshot and Recording View
Page
Recording Slider Bar
Page
Side Beam View, Default Layout
Side Beam View
Only with optional-purchase QuadraBeam Plus transducer
Side Beam View, Slanted Layout
Side Beam View, Classic Layout
Bird’s Eye View
Bird’s Eye View
Chart/Bird’s Eye Combo View
Chart/Bird’s Eye Combo View
Chart/Chart Combo View
Chart/Chart Combo View
Chart View with Active Cursor
Chart View
Chart/Sonar Combo View
Chart/Sonar Combo View
Chart/Side Combo View
Chart/Side Combo View
Chart Orientation
Chart View with Cursor Present
Viewing Cartography
Navigation
Waypoints, Routes and Tracks
Save, Edit, or Delete a Waypoint
Chart View with Target
Navigate to a Waypoint or Position
Add a Waypoint Target or Trolling Grid
Save, Edit or Delete a Route
Chart View with Grid
Edit, Delete or Hide Saved Tracks
Save or Clear a Current Track
MOB Navigation
Man Overboard MOB Navigation
Press Menu
Menu System
Start-Up Options Menu Sonar Tab, Normal Mode
Start-Up Options Menu
Normal Simulator System Status
System Status
Exit Normal operation by powering your 900 Series off
Normal Operation
Simulator
Self Test Screen
Accessory Test
Accessory Test Screen
Self Test
GPS Diagnostic View
GPS Diagnostic View
Sonar X-Press Menu
Active Side
Sonar X-Press Menu
Sensitivity
Split Position
Lower Range
Upper Range
Quad Layout
Chart Speed
Sonar Colors
Cancel Navigation
Bottom Lock
Bottom Range
Side Imaging X-Press Menu
Side Imaging Views only
Side Imaging X-Press Menu
SI Side
SI Sensitivity
SI Range
SI Colors
Navigation X-Press Menu
Navigation X-Press Menu
Waypoint Name
Only with an active cursor on a waypoint
Waypoint Submenu
Clear Current Track
Chart or Combo view only
Cursor to Waypoint
Save Current Track
Cancel MOB Navigation
Save Current Route
Skip Next Waypoint
Only if a Grid is active
Remove Target
Remove Grid
Only if a Target is active
Snapshot and Recording Press Menu
Snapshot and Recording View only
Snapshot and Recording PressMenu
To delete an image
Start Recording
Stop Recording
Delete Image
Delete Recording
Delete All Images
To specify the pings per second
Delete All Recordings
Pings Per Second
Playback Speed
Stop Playback
Sonar Menu Tab
Sonar Menu
Side Views only
Beam Select
Side View Frequency
Transducer will be displayed on the screen
Transducer Cone and Fish Arches
Fish ID+
Fish ID Sensitivity
RTS Window Wide
RTS Window Narrow RTS Window Off
Advanced, with optional purchase QuadraBeam Plus transducer
Bottom View
Zoom Width
KHz Sensitivity
Depth Lines
To change the 455 kHz Sensitivity setting
Depth Lines
Advanced
Surface Clutter
Noise Filter
Surface Clutter
Water Type
Max Depth
Color Bar
Temperature Graph
Sonar View only, with Temperature input
Transducer Select
Current Track Submenu
Navigation Menu Tab
Current Track
Navigation Menu
Saved Tracks Submenu
Saved Tracks
Waypoints
Waypoints Submenu contains the following menu choices
Routes Submenu
Routes
North Reference
Trolling Grid Rotation
Trackpoint Interval
Track Min Distance
Track Color Range
Map Datum
Export All Nav Data
Continuous Navigation Mode
Course Projection Line
Delete All Nav Data
Chart Menu Tab
Chart Detail Level
Chart Menu
Map Borders
Lat/Lon Grid
Spot Soundings
Navaids on Birds Eye View
Shaded Depth
Set Simulation Position
Clear Map Offset
Set Map Offset
Alarms Menu
Alarms Menu Tab
Depth Alarm
Fish ID Alarm
Aux Temp Alarm
Low Battery Alarm
Temp Alarm
Off Course Alarm
Off Course Alarm
Drift Alarm
Arrival Alarm
Alarm Tone
Setup Menu Tab
Setup Menu
Units Speed
Units Depth
Units Temp
Units Distance
Language
User Mode
Triplog Reset
Restore Defaults
Off Triplog Position Voltage Aux. Temperature
Select Readouts
Speed
Customized Sonar View
Default Sonar View
Local Time Zone
Aux Temp Offset
Speed Calibration
Temp Offset
Date Format
Daylight Saving Time
Position Format
Time Format
Nmea Output
Digits Format
Sonar
Views Menu Tab
Views Menu
Following views are available
Using Screen Snapshot
Accessories Menu Tab
119
Series Doesn’t Power Up
Troubleshooting
Control head loses power at high speeds
Display Problems
Finding the Cause of Noise
Humminbird Service Policy
Year Limited Warranty
Returning Your Unit for Service
Series include
Series Accessories
Page
Operating Frequency
Specifications
Power Output
Depth Capability
Sonar Terms
Glossary
129
Glossary
Receiver See Transmitter
Glossary
133
GPS & Navigation Terms
Glossary Sonar Terms
135
Glossary
Glossary
Transducer Mounting Template XHS 9 Hdsi 180 T
GlossaryGPS & Navigation Terms Appendix a
Contact Humminbird