Positioning
High-Speed, High-Precision Positioning
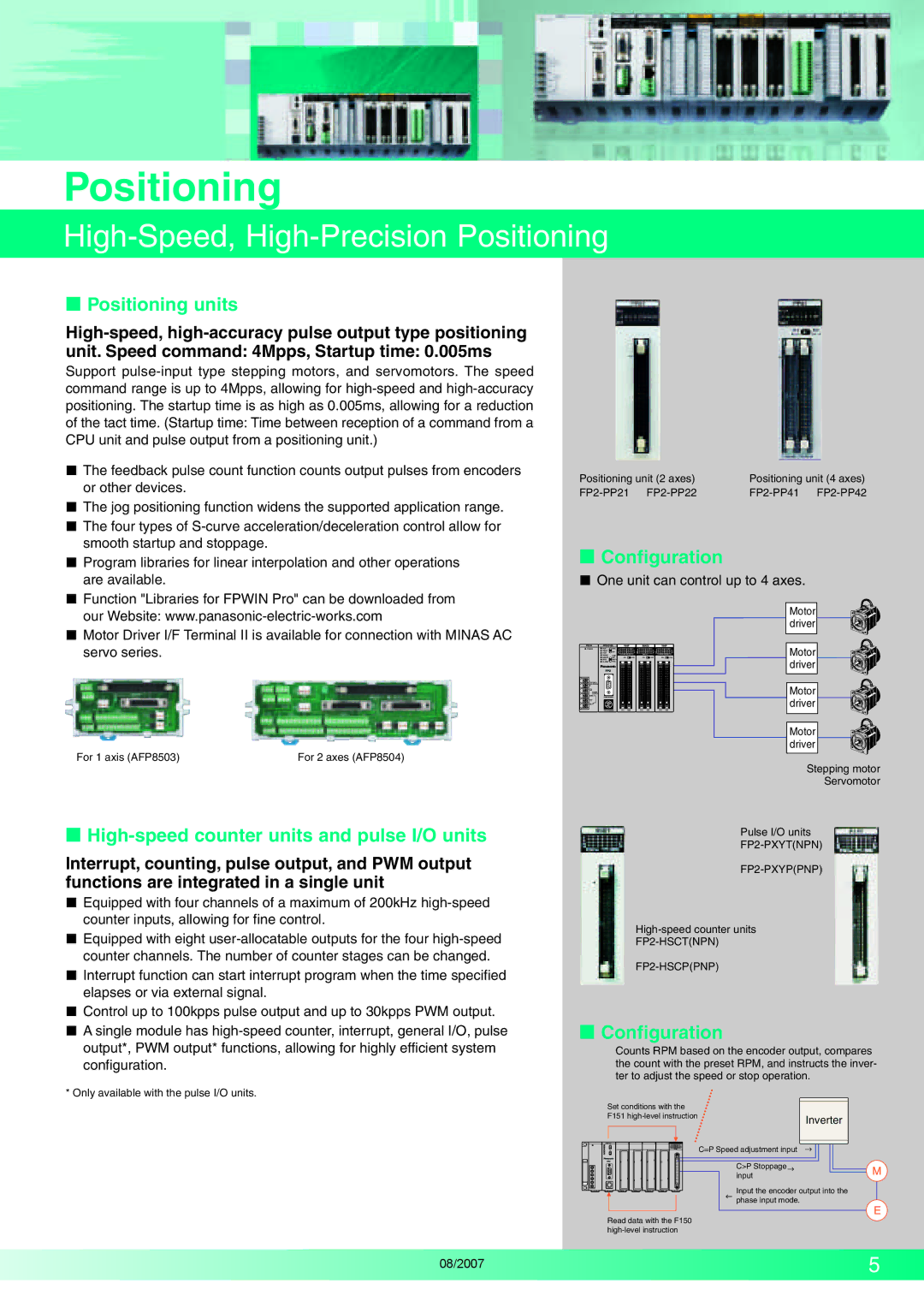
Positioning units
Support
The feedback pulse count function counts output pulses from encoders or other devices.
The jog positioning function widens the supported application range.
The four types of
Program libraries for linear interpolation and other operations are available.
Function "Libraries for FPWIN Pro" can be downloaded from our Website:
Motor Driver I/F Terminal II is available for connection with MINAS AC servo series.
For 1 axis (AFP8503) | For 2 axes (AFP8504) |
High-speed counter units and pulse I/O units
Interrupt, counting, pulse output, and PWM output functions are integrated in a single unit
Equipped with four channels of a maximum of 200kHz
Equipped with eight
Interrupt function can start interrupt program when the time specified elapses or via external signal.
Control up to 100kpps pulse output and up to 30kpps PWM output.
A single module has
* Only available with the pulse I/O units.
08/2007
Positioning unit (2 axes) | Positioning unit (4 axes) |
Configuration
One unit can control up to 4 axes.
Motor |
driver |
Motor driver
Motor |
driver |
Motor driver
Stepping motor
Servomotor
Pulse I/O units
Configuration
Counts RPM based on the encoder output, compares the count with the preset RPM, and instructs the inver ter to adjust the speed or stop operation.
Set conditions with the |
|
|
F151 |
| Inverter |
|
| |
| C=P Speed adjustment input |
|
| C>P Stoppage | M |
| input | |
|
|
Input the encoder output into the ![]() phase input mode.
phase input mode.
E
Read data with the F150