









52 | Barracuda 36ES2 Product Manual, Rev. B |
9.3.2Mode Sense data
The Mode Sense command provides a means for the drive to report its operating parameters to the initiator. The drive maintains four sets of Mode parameters, Default values, Saved values, Current values and Change- able values.
Default values are hard coded in the drive firmware that is stored in flash EPROM nonvolatile memory on the drive PCBA. Default values can be changed only by downloading a complete set of new firmware into the flash EPROM. An initiator can request and receive from the drive a list of default values and use those in a Mode Select command to set up new current and saved values, where the values are changeable.
Saved values are stored on the disk media using a Mode Select command. Only parameter values that are allowed to be changed can be changed by this method. See “Changeable values” defined below. Parameters in the saved values list that are not changeable by the Mode Select command get their values from the default values storage.
Current values are volatile values currently being used by the drive to control its operation. A Mode Select command can be used to change these values (only those that are changeable). Originally, they are installed from saved or default values after a power on reset, hard reset, or Bus Device Reset message.
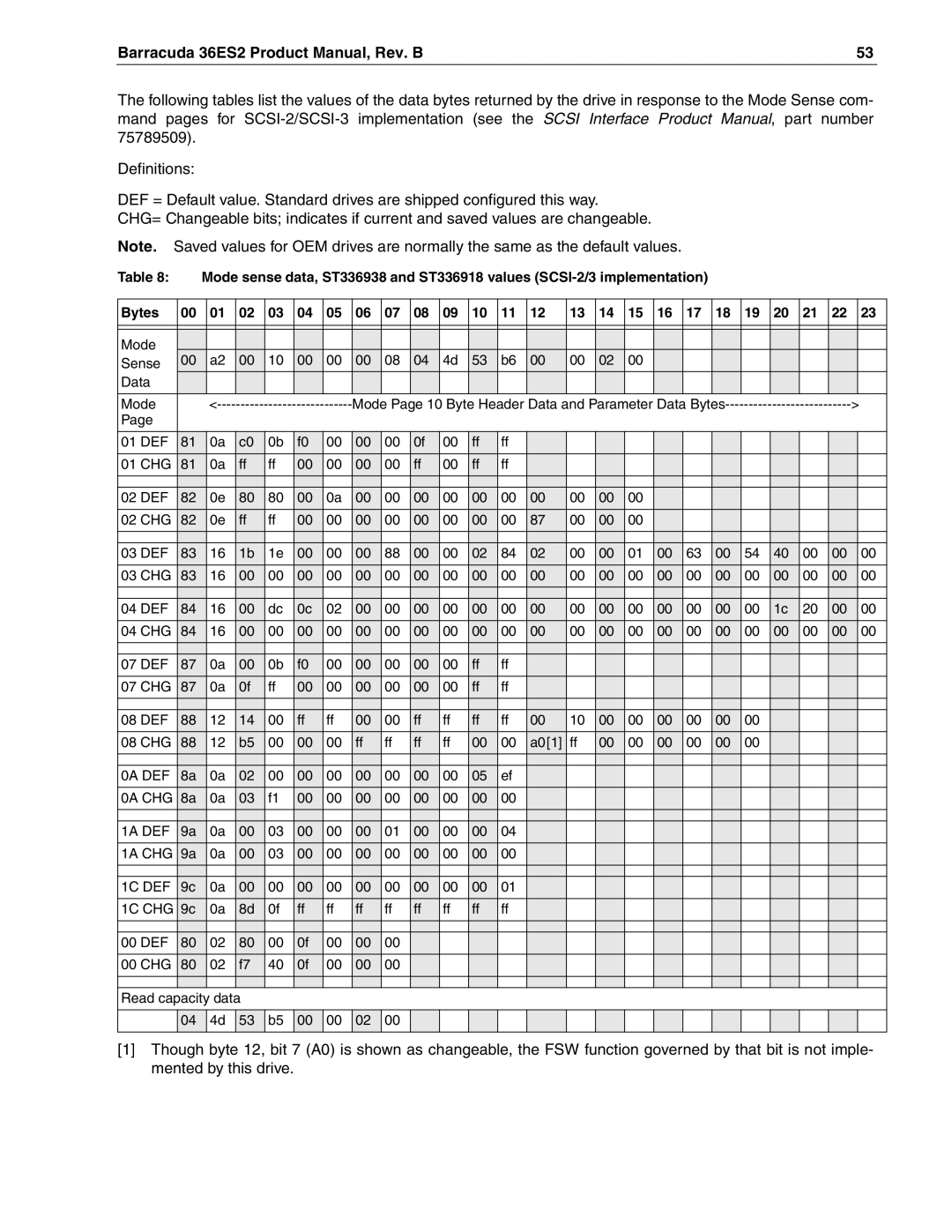
Changeable values form a bit mask, stored in nonvolatile memory, that dictates which of the current values and saved values can be changed by a Mode Select command. A “one” allows a change to a corresponding bit; a “zero” allows no change. For example, in Table 8 refer to Mode page 01, in the row entitled “CHG”. These are hex numbers representing the changeable values for mode page 01. Note that bytes 04, 05, 06, and 07 are not changeable, because those fields are all zeros. If some changeable code had a hex value EF, that equates to the binary pattern 1110 1111. If there is a zero in any bit position in the field, it means that bit is not changeable. Bits 7, 6, 5, 3, 2, 1, and 0 are changeable, because those bits are all ones. Bit 4 is not changeable.
Though the drive always reports
The Changeable values list can only be changed by downloading new firmware into the flash EPROM.
On standard OEM drives the Saved values are taken from the default values list and stored into the saved val- ues storage location on the media prior to shipping.
When a drive is powered up, it takes saved values from the media and stores them to the current values stor- age in volatile memory. It is not possible to change the current values (or the saved values) with a Mode Select command before the drive is up to speed and is “ready.” An attempt to do so results in a “Check Condition sta- tus being returned.
Note. Because there may be several different versions of drive control firmware in the total population of drives in the field, the Mode Sense values given in the following tables may not exactly match those of some drives.