PRINCIPLE OF OPERATION
The
The entire process begins in the display unit. Transmitter power is sent to the transducer as a short pulse of electrical energy. The electri- cal signal produced by the transmitter is con- verted into an ultrasonic signal by the transducer and transmitted into the water. Any returning signals from intervening objects (such as a fish school) are received by the transducer and converted into an electrical sig- nal. The signals are then amplified in the am- plifier section, and finally, displayed on the screen.
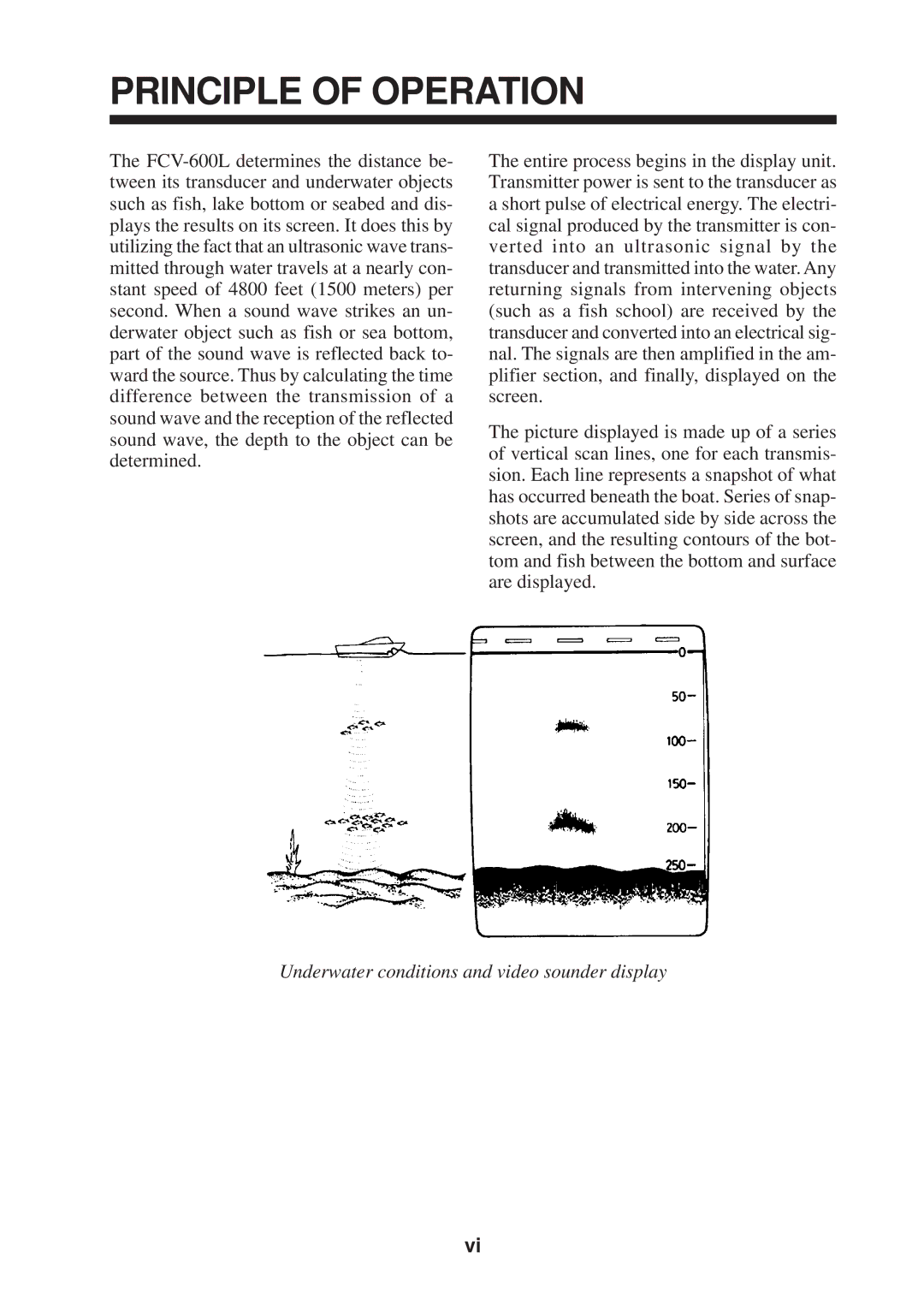
The picture displayed is made up of a series of vertical scan lines, one for each transmis- sion. Each line represents a snapshot of what has occurred beneath the boat. Series of snap- shots are accumulated side by side across the screen, and the resulting contours of the bot- tom and fish between the bottom and surface are displayed.
Underwater conditions and video sounder display
vi