4. Serial Port Connectivity
4.1.Serial Port Adapters
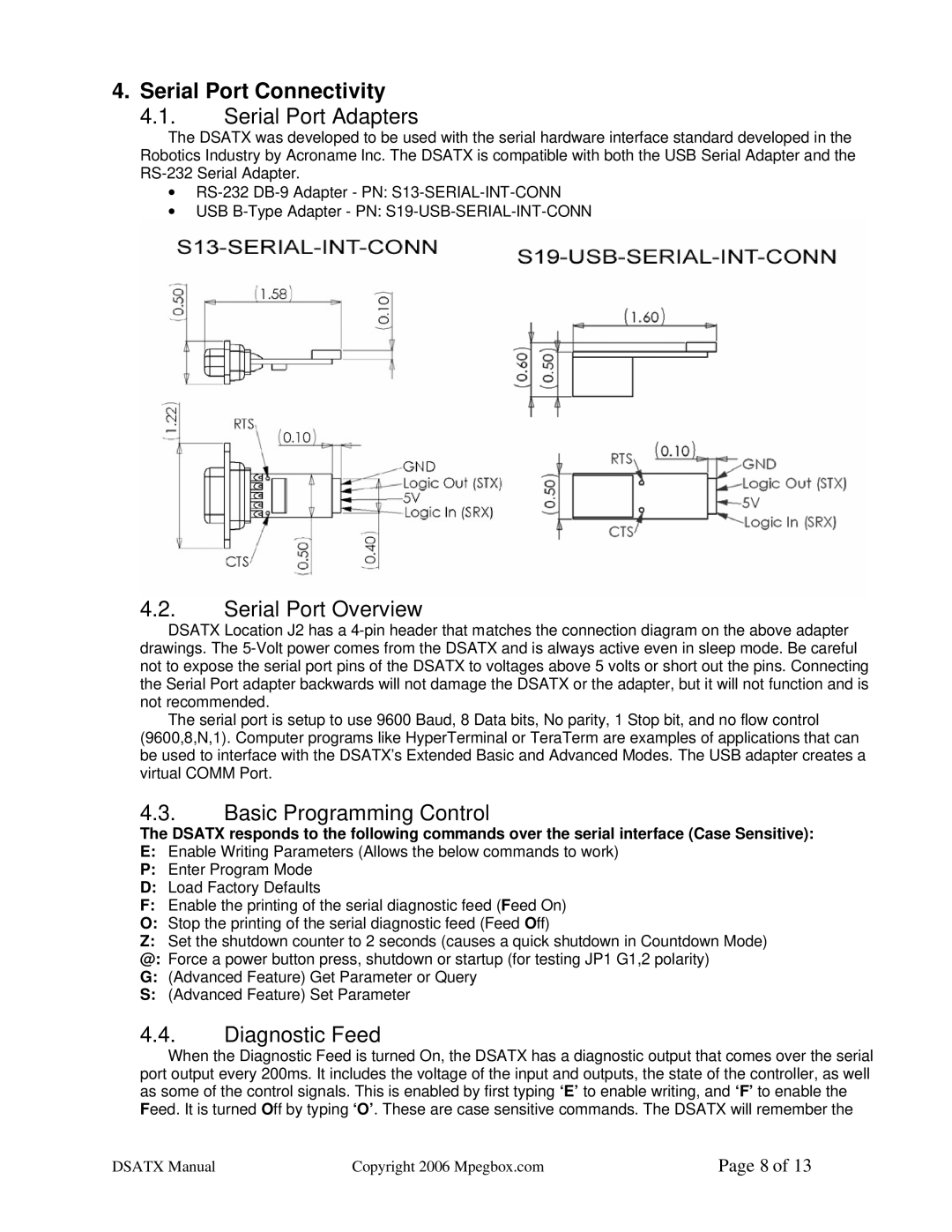
The DSATX was developed to be used with the serial hardware interface standard developed in the Robotics Industry by Acroname Inc. The DSATX is compatible with both the USB Serial Adapter and the
∙
∙USB
4.2.Serial Port Overview
DSATX Location J2 has a
The serial port is setup to use 9600 Baud, 8 Data bits, No parity, 1 Stop bit, and no flow control (9600,8,N,1). Computer programs like HyperTerminal or TeraTerm are examples of applications that can be used to interface with the DSATX’s Extended Basic and Advanced Modes. The USB adapter creates a virtual COMM Port.
4.3.Basic Programming Control
The DSATX responds to the following commands over the serial interface (Case Sensitive):
E:Enable Writing Parameters (Allows the below commands to work)
P:Enter Program Mode
D:Load Factory Defaults
F:Enable the printing of the serial diagnostic feed (Feed On)
O:Stop the printing of the serial diagnostic feed (Feed Off)
Z:Set the shutdown counter to 2 seconds (causes a quick shutdown in Countdown Mode) @: Force a power button press, shutdown or startup (for testing JP1 G1,2 polarity)
G:(Advanced Feature) Get Parameter or Query
S:(Advanced Feature) Set Parameter
4.4.Diagnostic Feed
When the Diagnostic Feed is turned On, the DSATX has a diagnostic output that comes over the serial port output every 200ms. It includes the voltage of the input and outputs, the state of the controller, as well as some of the control signals. This is enabled by first typing ‘E’ to enable writing, and ‘F’ to enable the Feed. It is turned Off by typing ‘O’. These are case sensitive commands. The DSATX will remember the
DSATX Manual | Copyright 2006 Mpegbox.com | Page 8 of 13 |