E6581295⑥
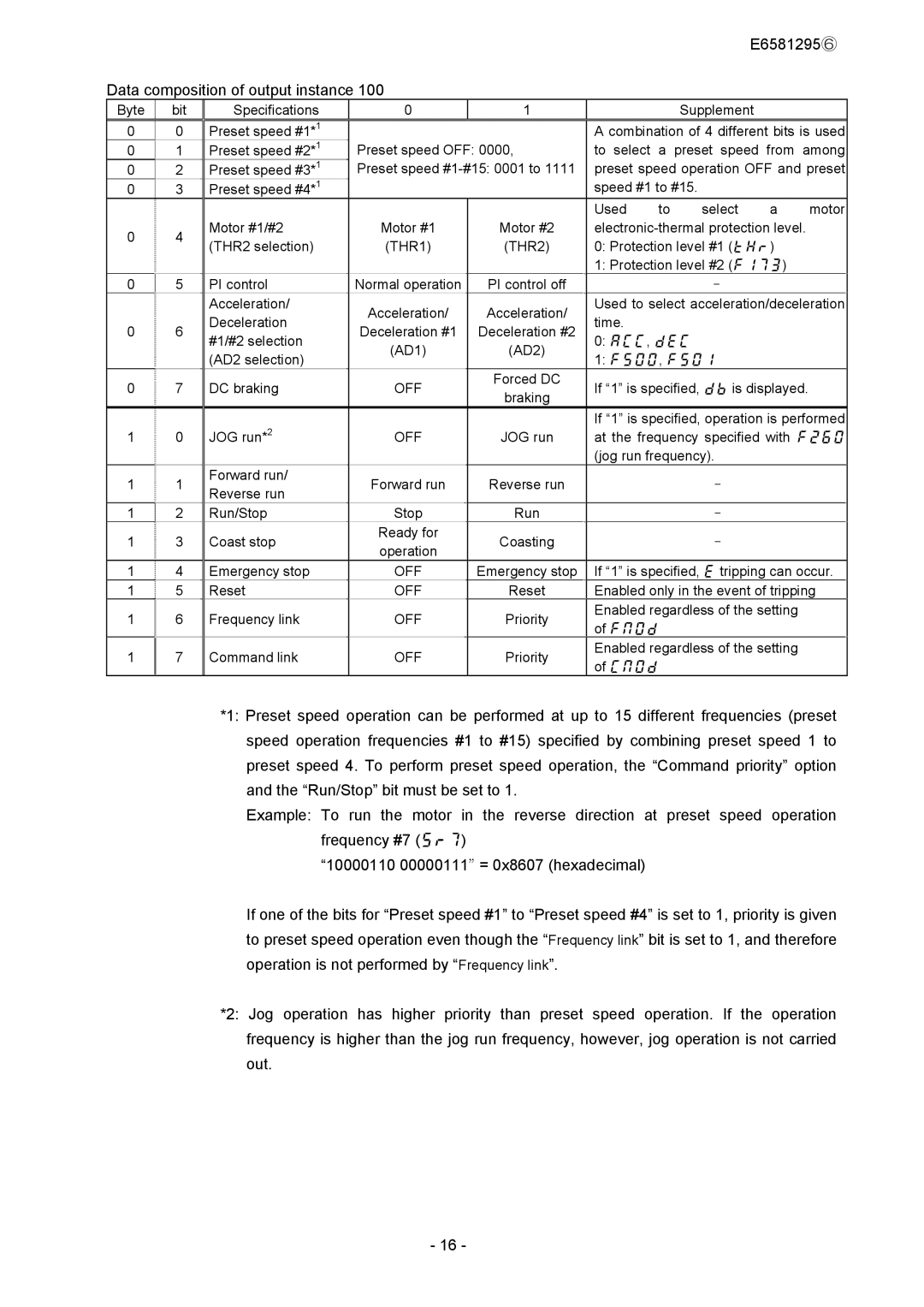
Data composition of output instance 100
Byte | bit |
0 | 0 |
0 | 1 |
0 | 2 |
0 | 3 |
0 | 4 |
0 | 5 |
0 | 6 |
0 | 7 |
|
|
1 | 0 |
1 | 1 |
1 | 2 |
1 | 3 |
|
|
1 | 4 |
1 | 5 |
1 | 6 |
1 | 7 |
|
|
Specifications | 0 | 1 |
| Supplement |
|
| |
Preset speed #1*1 |
|
| A combination of 4 different bits is used | ||||
Preset speed #2*1 | Preset speed OFF: 0000, | to select a preset speed from among | |||||
Preset speed #3*1 | Preset speed | preset speed operation OFF and preset | |||||
Preset speed #4*1 |
|
| speed #1 to #15. |
|
|
| |
|
|
| Used | to | select | a | motor |
Motor #1/#2 | Motor #1 | Motor #2 |
| ||||
(THR2 selection) | (THR1) | (THR2) | 0: Protection level #1 (thr) |
| |||
|
|
| 1: Protection level #2 (f173) |
| |||
PI control | Normal operation | PI control off |
|
| - |
|
|
Acceleration/ | Acceleration/ | Acceleration/ | Used to select acceleration/deceleration | ||||
Deceleration | time. |
|
|
|
| ||
Deceleration #1 | Deceleration #2 |
|
|
|
| ||
#1/#2 selection | 0: acc, dec |
|
|
| |||
(AD1) | (AD2) |
|
|
| |||
(AD2 selection) | 1: f500, f501 |
|
| ||||
|
|
|
| ||||
DC braking | OFF | Forced DC | If “1” is specified, db is displayed. |
| |||
braking |
| ||||||
|
|
|
|
|
|
| |
JOG run*2 |
|
| If “1” is specified, operation is performed | ||||
OFF | JOG run | at the frequency specified with f260 | |||||
|
|
| (jog run frequency). |
|
| ||
Forward run/ | Forward run | Reverse run |
|
| - |
|
|
Reverse run |
|
|
|
| |||
|
|
|
|
|
|
| |
Run/Stop | Stop | Run |
|
| - |
|
|
Coast stop | Ready for | Coasting |
|
| - |
|
|
operation |
|
|
|
| |||
|
|
|
|
|
|
| |
Emergency stop | OFF | Emergency stop | If “1” is specified, e tripping can occur. | ||||
Reset | OFF | Reset | Enabled only in the event of tripping | ||||
Frequency link | OFF | Priority | Enabled regardless of the setting |
| |||
of fmod |
|
|
| ||||
|
|
|
|
|
| ||
Command link | OFF | Priority | Enabled regardless of the setting |
| |||
of cmod |
|
|
| ||||
|
|
|
|
|
| ||
*1: Preset speed operation can be performed at up to 15 different frequencies (preset speed operation frequencies #1 to #15) specified by combining preset speed 1 to preset speed 4. To perform preset speed operation, the “Command priority” option and the “Run/Stop” bit must be set to 1.
Example: To run the motor in the reverse direction at preset speed operation frequency #7 (sr7)
“10000110 00000111” = 0x8607 (hexadecimal)
If one of the bits for “Preset speed #1” to “Preset speed #4” is set to 1, priority is given to preset speed operation even though the “Frequency link” bit is set to 1, and therefore operation is not performed by “Frequency link”.
*2: Jog operation has higher priority than preset speed operation. If the operation frequency is higher than the jog run frequency, however, jog operation is not carried out.
- 16 -