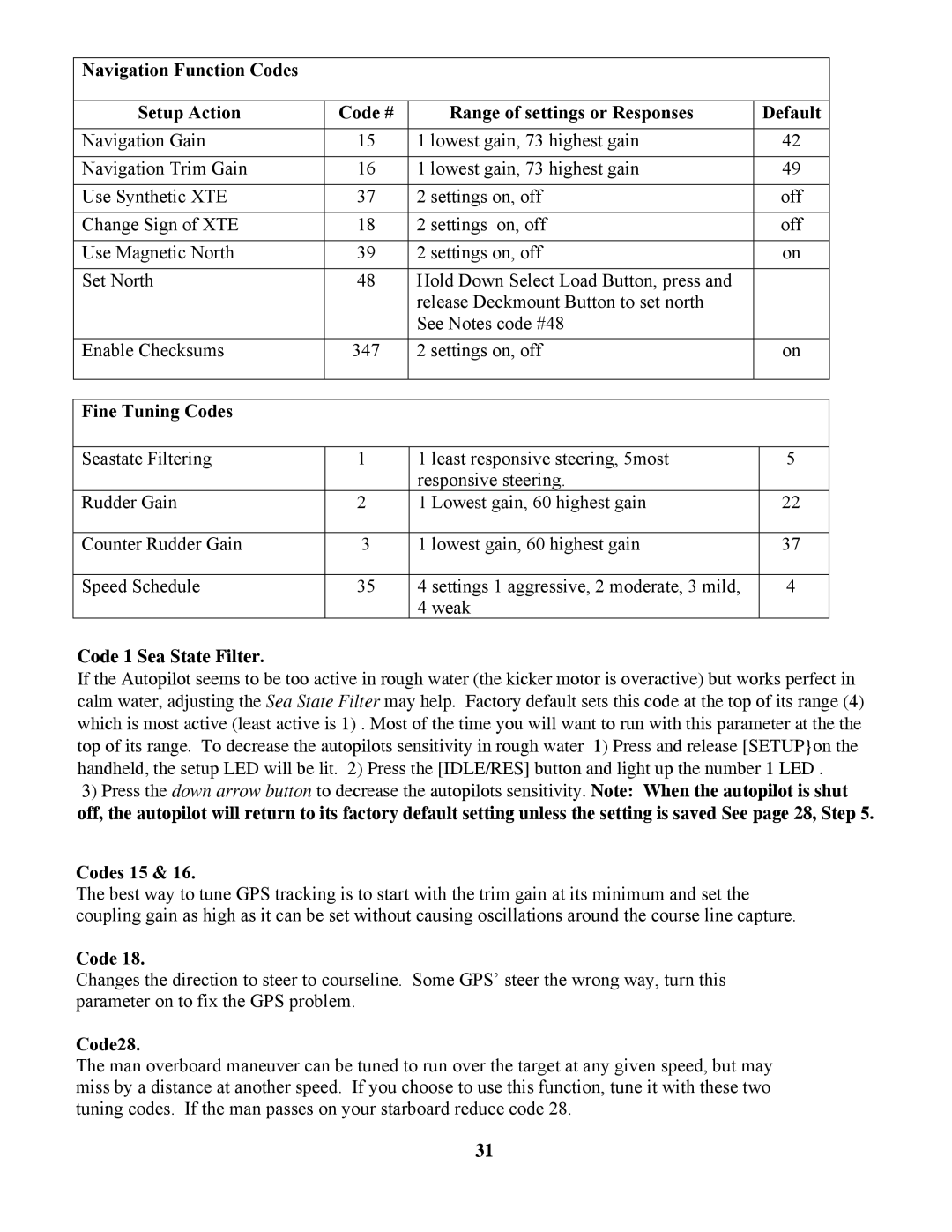
Navigation Function Codes |
|
|
|
|
|
|
|
|
|
Setup Action | Code # | Range of settings or Responses |
| Default |
|
|
|
|
|
Navigation Gain | 15 | 1 lowest gain, 73 highest gain | 42 | |
|
|
|
|
|
Navigation Trim Gain | 16 | 1 lowest gain, 73 highest gain | 49 | |
|
|
|
|
|
Use Synthetic XTE | 37 | 2 settings on, off |
| off |
|
|
|
|
|
Change Sign of XTE | 18 | 2 settings on, off |
| off |
|
|
|
|
|
Use Magnetic North | 39 | 2 settings on, off |
| on |
|
|
|
|
|
Set North | 48 | Hold Down Select Load Button, press and |
|
|
|
| release Deckmount Button to set north |
|
|
|
| See Notes code #48 |
|
|
|
|
|
|
|
Enable Checksums | 347 | 2 settings on, off |
| on |
|
|
|
|
|
|
|
|
|
|
Fine Tuning Codes |
|
|
|
|
|
|
|
|
|
Seastate Filtering | 1 | 1 least responsive steering, 5most |
| 5 |
|
| responsive steering. |
|
|
Rudder Gain | 2 | 1 Lowest gain, 60 highest gain |
| 22 |
|
|
|
|
|
Counter Rudder Gain | 3 | 1 lowest gain, 60 highest gain |
| 37 |
|
|
|
|
|
Speed Schedule | 35 | 4 settings 1 aggressive, 2 moderate, 3 mild, |
| 4 |
|
| 4 weak |
|
|
Code 1 Sea State Filter.
If the Autopilot seems to be too active in rough water (the kicker motor is overactive) but works perfect in calm water, adjusting the Sea State Filter may help. Factory default sets this code at the top of its range (4) which is most active (least active is 1) . Most of the time you will want to run with this parameter at the the top of its range. To decrease the autopilots sensitivity in rough water 1) Press and release [SETUP}on the handheld, the setup LED will be lit. 2) Press the [IDLE/RES] button and light up the number 1 LED .
3)Press the down arrow button to decrease the autopilots sensitivity. Note: When the autopilot is shut off, the autopilot will return to its factory default setting unless the setting is saved See page 28, Step 5.
Codes 15 & 16.
The best way to tune GPS tracking is to start with the trim gain at its minimum and set the coupling gain as high as it can be set without causing oscillations around the course line capture.
Code 18.
Changes the direction to steer to courseline. Some GPS’ steer the wrong way, turn this parameter on to fix the GPS problem.
Code28.
The man overboard maneuver can be tuned to run over the target at any given speed, but may miss by a distance at another speed. If you choose to use this function, tune it with these two tuning codes. If the man passes on your starboard reduce code 28.
31