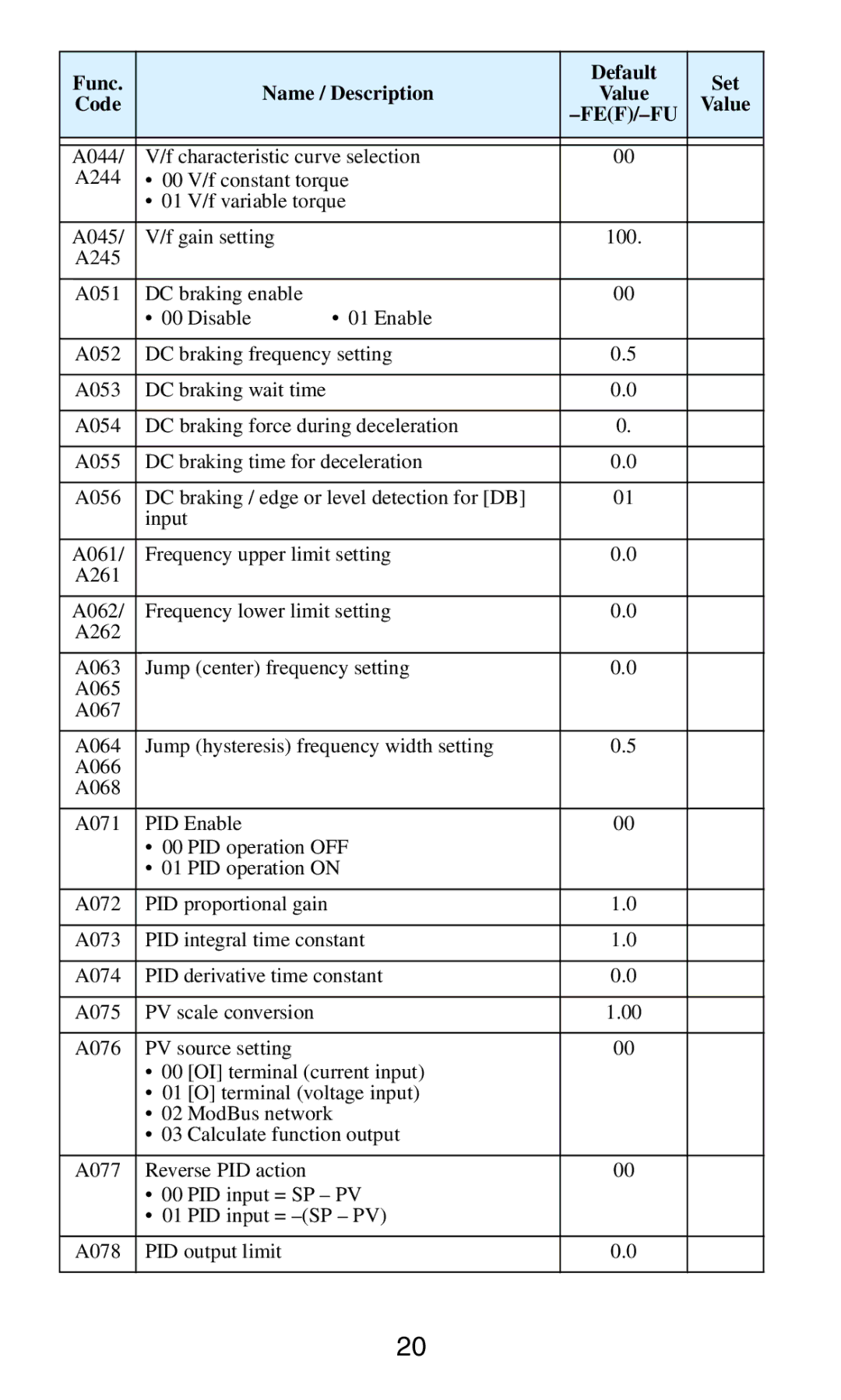
Func. |
|
|
| Default | Set |
| Name / Description | Value | |||
Code |
| Value | |||
|
|
| |||
|
|
|
|
| |
|
|
|
| ||
|
|
|
| ||
A044/ | V/f characteristic curve selection | 00 |
| ||
A244 | • 00 V/f constant torque |
|
| ||
| • | 01 V/f variable torque |
|
| |
|
|
|
|
| |
A045/ | V/f gain setting |
| 100. |
| |
A245 |
|
|
|
|
|
|
|
|
|
| |
A051 | DC braking enable |
| 00 |
| |
| • 00 Disable | • 01 Enable |
|
| |
|
|
|
| ||
A052 | DC braking frequency setting | 0.5 |
| ||
|
|
|
|
| |
A053 | DC braking wait time |
| 0.0 |
| |
|
|
|
| ||
A054 | DC braking force during deceleration | 0. |
| ||
|
|
|
| ||
A055 | DC braking time for deceleration | 0.0 |
| ||
|
|
|
| ||
A056 | DC braking / edge or level detection for [DB] | 01 |
| ||
| input |
|
|
| |
|
|
|
| ||
A061/ | Frequency upper limit setting | 0.0 |
| ||
A261 |
|
|
|
|
|
|
|
|
| ||
A062/ | Frequency lower limit setting | 0.0 |
| ||
A262 |
|
|
|
|
|
|
|
|
| ||
A063 | Jump (center) frequency setting | 0.0 |
| ||
A065 |
|
|
|
|
|
A067 |
|
|
|
|
|
|
|
|
| ||
A064 | Jump (hysteresis) frequency width setting | 0.5 |
| ||
A066 |
|
|
|
|
|
A068 |
|
|
|
|
|
|
|
|
|
| |
A071 | PID Enable |
| 00 |
| |
| • 00 PID operation OFF |
|
| ||
| • 01 PID operation ON |
|
| ||
|
|
|
|
| |
A072 | PID proportional gain |
| 1.0 |
| |
|
|
|
| ||
A073 | PID integral time constant | 1.0 |
| ||
|
|
|
| ||
A074 | PID derivative time constant | 0.0 |
| ||
|
|
|
|
| |
A075 | PV scale conversion |
| 1.00 |
| |
|
|
|
|
| |
A076 | PV source setting |
| 00 |
| |
| • | 00 [OI] terminal (current input) |
|
| |
| • | 01 [O] terminal (voltage input) |
|
| |
| • 02 ModBus network |
|
| ||
| • | 03 Calculate function output |
|
| |
|
|
|
|
| |
A077 | Reverse PID action |
| 00 |
| |
| • 00 PID input = SP – PV |
|
| ||
| • 01 PID input = |
|
| ||
|
|
|
|
| |
A078 | PID output limit |
| 0.0 |
| |
|
|
|
|
|
|
20