Views
The views available on your Matrix™ are: |
|
Sonar views: | Navigation views: |
• Sonar View | • Bird’s Eye View |
• Zoom View | • Chart View |
• 200/83 kHz Split Sonar View | • Combo View |
• Big Digits View |
|
• Side Beam View |
|
• WideSide® View |
|
NOTE: Side Beam View and WideSide® View requires the purchase of the QuadraBeam™ transducer for the Side Beam View and the WideSide® transducer for the WideSide® View. You can
Sonar View
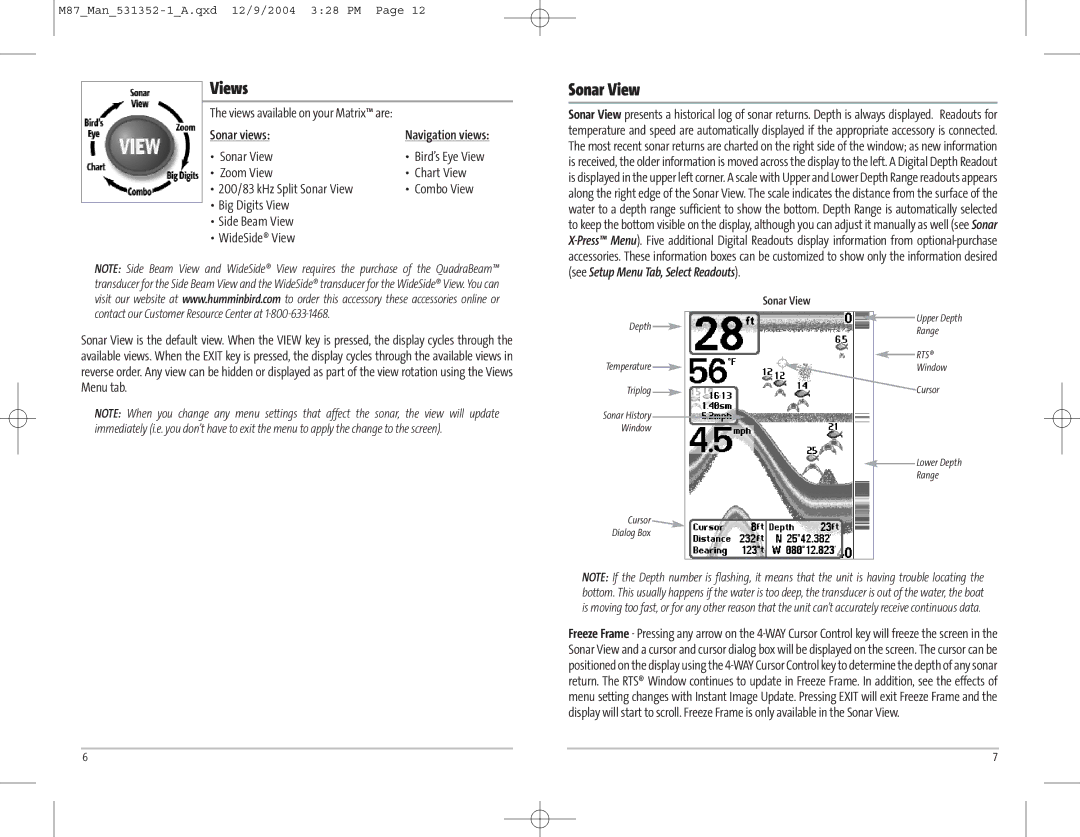
Sonar View presents a historical log of sonar returns. Depth is always displayed. Readouts for temperature and speed are automatically displayed if the appropriate accessory is connected. The most recent sonar returns are charted on the right side of the window; as new information is received, the older information is moved across the display to the left. A Digital Depth Readout is displayed in the upper left corner. A scale with Upper and Lower Depth Range readouts appears along the right edge of the Sonar View. The scale indicates the distance from the surface of the water to a depth range sufficient to show the bottom. Depth Range is automatically selected to keep the bottom visible on the display, although you can adjust it manually as well (see Sonar
visit our website at www.humminbird.com to order this accessory these accessories online or contact our Customer Resource Center at
Sonar View is the default view. When the VIEW key is pressed, the display cycles through the available views. When the EXIT key is pressed, the display cycles through the available views in reverse order. Any view can be hidden or displayed as part of the view rotation using the Views Menu tab.
NOTE: When you change any menu settings that affect the sonar, the view will update immediately (i.e. you don’t have to exit the menu to apply the change to the screen).
Depth ![]()
Temperature ![]()
Triplog ![]()
Sonar History
Window
Cursor![]() Dialog Box
Dialog Box
Sonar View
![]() Upper Depth
Upper Depth
Range
RTS®
Window
Cursor
 Lower Depth
Lower Depth
Range
NOTE: If the Depth number is flashing, it means that the unit is having trouble locating the bottom. This usually happens if the water is too deep, the transducer is out of the water, the boat is moving too fast, or for any other reason that the unit can’t accurately receive continuous data.
Freeze Frame - Pressing any arrow on the
6 | 7 |