B.The hi-pot tester must have an automatic ramp-up to the test voltage and an automatic ramp-down to zero voltage.
Note: If the hi-pot tester does not have automatic ramping, then the hi-pot output must be manually increased to the test voltage and then manually reduced to zero. This pro- cedure must be followed for each machine to be tested. A suggested hi-pot tester is Slaughter Model 2550.
WARNING! Instantaneously applying the hi-pot voltage will cause irreversible dam-
!age to the speed control.
C.The hi-pot test voltage should be set in accordance to the testing agency standards and the leakage current should be set as low as possible without causing nuisance trips.
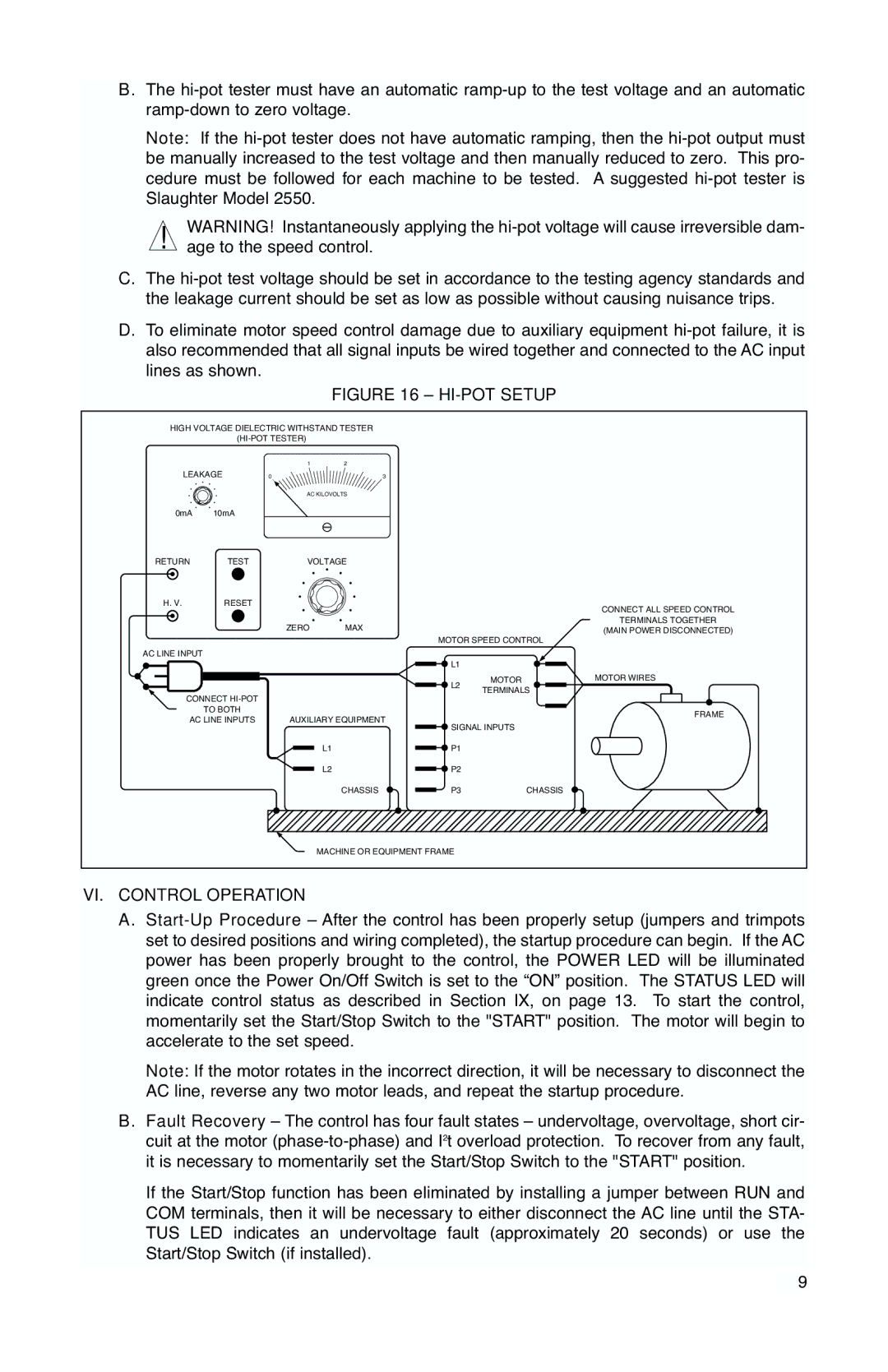
D.To eliminate motor speed control damage due to auxiliary equipment hi-pot failure, it is also recommended that all signal inputs be wired together and connected to the AC input lines as shown.
FIGURE 16 – HI-POT SETUP
HIGH VOLTAGE DIELECTRIC WITHSTAND TESTER | | | |
| (HI-POT TESTER) | | | | |
| | 1 | 2 | | | |
LEAKAGE | 0 | 3 | | | |
| | AC KILOVOLTS | | | |
0mA | 10mA | | | | | |
RETURN | TEST | VOLTAGE | | | |
H. V. | RESET | | | | | CONNECT ALL SPEED CONTROL |
| | | | | |
| | ZERO | MAX | | | TERMINALS TOGETHER |
| | | | (MAIN POWER DISCONNECTED) |
| | | | | |
| | | | MOTOR SPEED CONTROL |
AC LINE INPUT | | | | | | |
| | | | L1 | | |
| | | | L2 | MOTOR | MOTOR WIRES |
| | | | TERMINALS |
CONNECT HI-POT | | | |
| | | | |
| TO BOTH | | | | | FRAME |
AC LINE INPUTS | AUXILIARY EQUIPMENT | | |
SIGNAL INPUTS | |
| | | | |
| | L1 | | P1 | | |
| | L2 | | P2 | | |
| | | CHASSIS | P3 | | CHASSIS |
| | MACHINE OR EQUIPMENT FRAME | | |
VI. CONTROL OPERATION | | | | |
A.Start-Up Procedure – After the control has been properly setup (jumpers and trimpots set to desired positions and wiring completed), the startup procedure can begin. If the AC power has been properly brought to the control, the POWER LED will be illuminated green once the Power On/Off Switch is set to the “ON” position. The STATUS LED will indicate control status as described in Section IX, on page 13. To start the control, momentarily set the Start/Stop Switch to the "START" position. The motor will begin to accelerate to the set speed.
Note: If the motor rotates in the incorrect direction, it will be necessary to disconnect the AC line, reverse any two motor leads, and repeat the startup procedure.
B.Fault Recovery – The control has four fault states – undervoltage, overvoltage, short cir- cuit at the motor (phase-to-phase) and I2t overload protection. To recover from any fault, it is necessary to momentarily set the Start/Stop Switch to the "START" position.
If the Start/Stop function has been eliminated by installing a jumper between RUN and COM terminals, then it will be necessary to either disconnect the AC line until the STA- TUS LED indicates an undervoltage fault (approximately 20 seconds) or use the Start/Stop Switch (if installed).