SECTION 2
Camera Hardware Interface
2.1 Installation Overview
Before you integrate your camera into your system you should first determine some basic operating parameters such as what resolution you need. Do you know the speed of the object that your camera will be inspecting? One additional point you want to keep in mind is your lighting requirement.
Some other major items that you should identify early on in developing your system is the source of your EXSYNC control signal (framegrabber, custom controller, shaft/web encoder, etc.). You should also
We will use a simple example to reinforce what we just told you in the above. Let’s say that you have the following system to set up: inspect a web 10cm wide, moving at 2m/s, and you want 100∝m on the web to be represented by one pixel (13∝m).
Number of Pixels | Total width of image = |
| 10 cm |
| = 1000 pixels | |||
Necessary | Desired resolution |
| 100∝m per pixel |
| ||||
Magnification | Pixel size | = |
|
| 13∝m |
| = 0.130 | |
| Desired resolution |
| 100∝m per pixel |
| ||||
EXSYNC | Web speed | = |
|
| 2m/s | = 20KHz | ||
| Desired resolution |
|
|
| 100∝m |
| ||
Shaft Encoder | You require one pulse for every 100∝m of |
| ||||||
Circumference | object travel. Assuming a shaft/web encoder = 0.10m | |||||||
| Producing 1000 pulses/rev., shaft |
| ||||||
| Circumference must be 1000 x 100∝m |
| ||||||
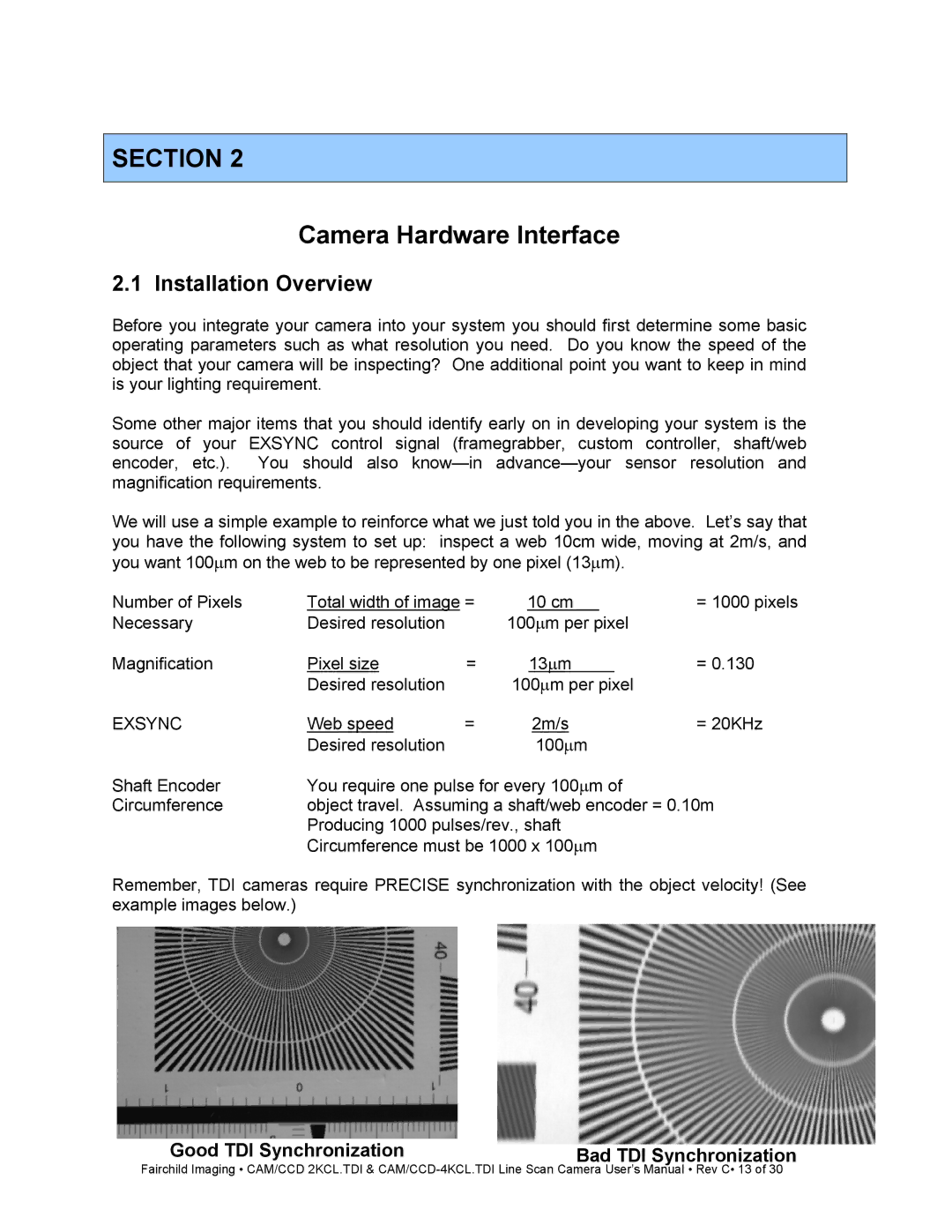
Remember, TDI cameras require PRECISE synchronization with the object velocity! (See example images below.)
Good TDI Synchronization | Bad TDI Synchronization |
Fairchild Imaging • CAM/CCD 2KCL.TDI &