Usage
1)Open Nand Flash sample project, and start debug.
2)Use “step over” to debug, and watch local variable “sec”, “min”, “hour”.
4.4 CAN
Hardware Setting
Connect 2
EV board 1
(Node A)
CAN 1 ![]()
![]()
CAN 2
CAN 1
CAN 2
EV board 2
(Node B)
Figure
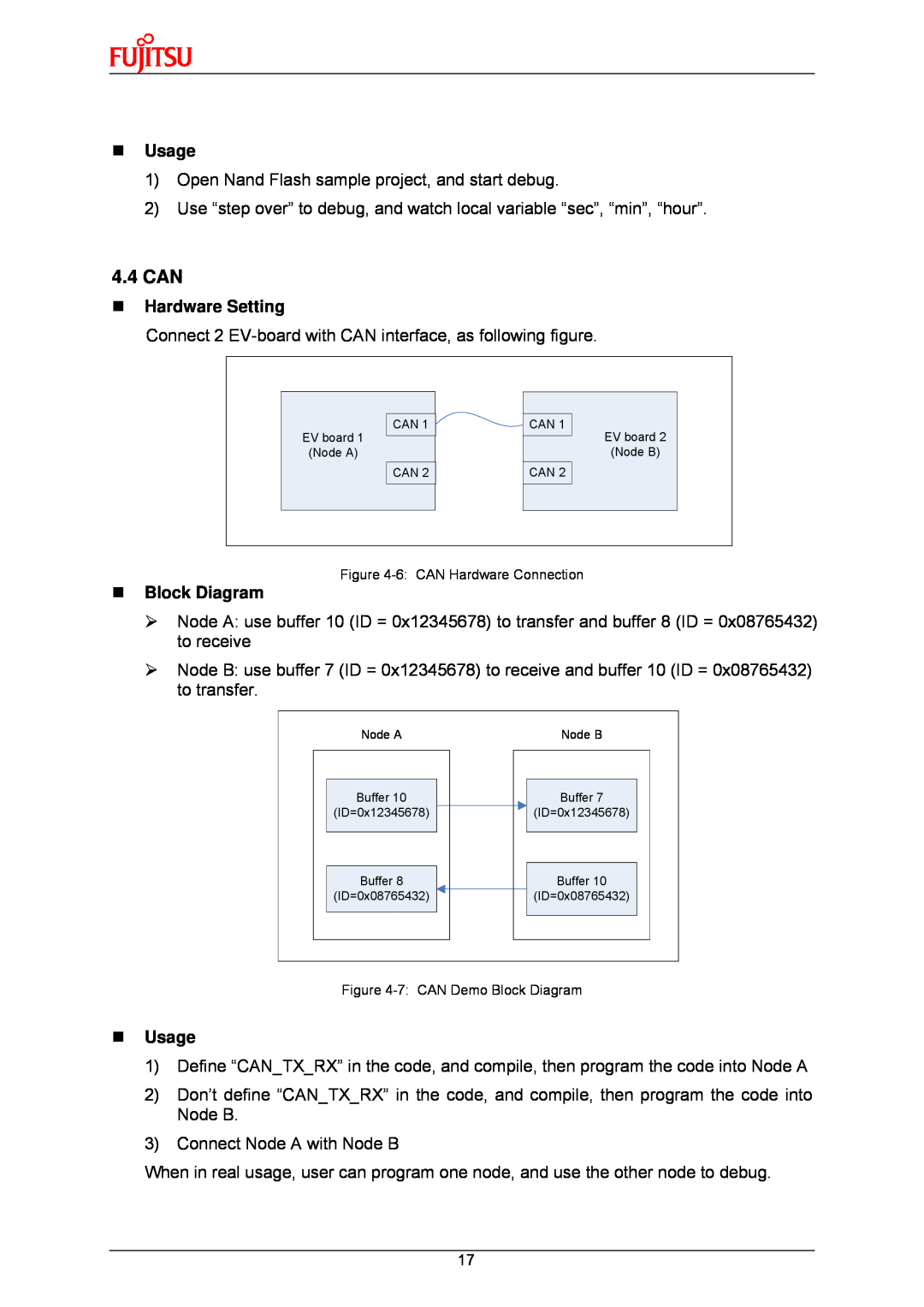
Block Diagram
¾Node A: use buffer 10 (ID = 0x12345678) to transfer and buffer 8 (ID = 0x08765432) to receive
¾Node B: use buffer 7 (ID = 0x12345678) to receive and buffer 10 (ID = 0x08765432) to transfer.
Node A | Node B |
Buffer 10 | Buffer 7 |
(ID=0x12345678) | (ID=0x12345678) |
Buffer 8 | Buffer 10 |
(ID=0x08765432) | (ID=0x08765432) |
Figure
Usage
1)Define “CAN_TX_RX” in the code, and compile, then program the code into Node A
2)Don’t define “CAN_TX_RX” in the code, and compile, then program the code into Node B.
3)Connect Node A with Node B
When in real usage, user can program one node, and use the other node to debug.
17