THD Satellite Compass
00014854802
Safety Instructions
Table of Contents
Iii
MAINTENANCE, Troubleshooting
Word to the Owner of the SC-50
Features
System configuration
System Configuration
Standard supply
Equipment List
SC-50
THD Specifications of THD Satellite Compass
Coating Color
Antenna unit
Installing the antenna above superstructures
Installing the antenna below superstructures
Mounting Considerations
Horizontal separation between antenna and masts
Mast diameter Separation distance minimum
Antenna and field of view
Display unit, processor unit
Example of antenna installed below superstructures
Mounting dimensions for antenna, orienting the antenna
Installing the Antenna Unit
Antenna unit SC-303
Cable from antenna No. marked on cable
Waterproofing the antenna connector
How to fasten the antenna cable
Coating bolt, nut and washers with silicone sealant
Antenna unit
How to insert the cable cover
Antenna unit SC-603
How to orient the antenna elements
Antenna unit SC-603
Mounting
Fixing antenna unit to pedestal
Orienting the antenna unit top view
Orient the antenna unit as shown in the illustration below
Welding the antenna unit
Antenna element
Fastening the antenna cable
Bulkhead mount
Installing the Processor Unit
Bulkhead mount
Processor unit orientation, deck mounting
Deck mount
Mounting on underside of desk
Installation on the underside of a desk
Installation of processor unit on the underside of a desk
Processor Unit, rear view
Desktop, overhead mounting
Installing the Display Unit
Flush mount
Flush mount S kit Type OP20-17, Code No
Flush mount S
Flush mount S
Wiring
Wiring
Sectional view of coaxial cable DPYC-1.5
How to install the optional antenna cable set
How to attach connector N-P-8DFB
How to attach connector N-P-8DFB
Confirming satellite status
Initial Settings
Satellite tracking status display
Choosing mounting method
Installation setup menu
Main menu
Connection of External Equipment
General wiring
Processor unit, cover opened
Cable Sectional view, fabrication
Fabrication of cables
This page intentionally left blank
Display unit
Controls
Panel Illumination, Display Contrast
Turning the Power On/Off
Processor unit
Nav data display
Choosing a Display
Description of displays
Heading display
Compass display
Steering display
ROT Rate-of-Turn display
SOG/STW display
Speed display
Buzzer options
Alarm Setup
Alarm menu
Dgps alarm options
Satellite status display
Confirming Satellite Status
Displaying the GPS setup menu
GPS Setup
GPS Setup menu description
Output Data
Disable SV Disable satellite
Heading
Baud rate options
Data OUT1 menu, sentences
IEC, Nmea version options
Tx interval options
Heading talker options
Sentence and maximum number of characters
Output sentence limitation
Log pulse options
Log pulse
System Setup menu
System Setup
Geodetic data
Units of measurement
Using local time
Time format
Demonstration mode
Waas Search options
WAAS/DGPS Setup
Position fix mode options
WAAS/DGPS menu
GEO satellite and coverage area
Provider GEO Satellite Longitude
AUTO/MANUAL options
Operation
Others menu
Others Menu
HDG Restoration options
Trip menu
Trip Menu
Heading setup menu
Resetting Distance Run
Choosing External Heading Source for Backup
Reset Distance prompt
Preventive Maintenance
MAINTENANCE, Troubleshooting
Troubleshooting
Troubleshooting
Symptom Cause Remedy
Test start prompt
Diagnostics
Diagnostic test1
Test menu options
ROM, RAM, KEY Test
Diagnostic test sequence
TEST2 display
Diagnostic test2
Alarm options
Diagnostic test3
TEST3 menu
Prompts for erasure of data
Program Number
Clearing Data
Program number display
Prompt for turning off the power
Replacement of Battery
Battery Location Type Code No
Prompt for exchanging battery
Message display
Replacement of Fuse
Error Messages
Error Message Meaning Remedy
Data ERR
Error messages con’t from previous
AP-1
Menu Tree
Digital Interface
Data Out
Schematic diagrams
AP-3
Data
AP-4
Data sentences
GNS Gnns fix data
AP-5
VBW Dual ground/water speed
AP-6
VLW Distance travelled through the water
AP-7
Input/Output Ports
Port Terminal Name Signal Remarks Label
AP-8
Hdthdghdm
AP-9
AP-10
Parts List and Parts Location
Processor Unit, cover removed
Display Unit, cover opened
AP-11
AP-12
Geodetic Chart Codes
AP-13
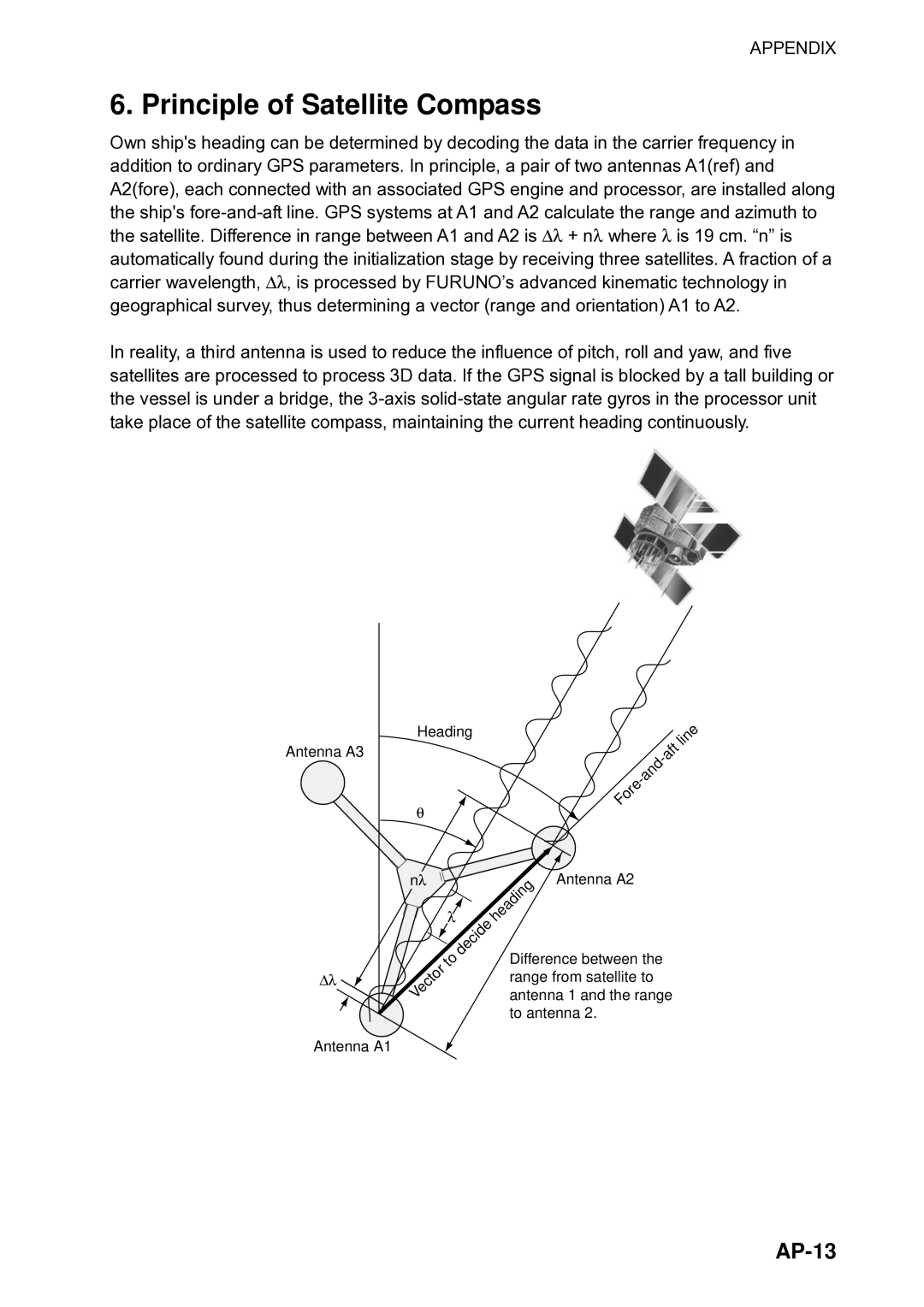
Principle of Satellite Compass
AP-14
What is WAAS?
Packing List
Page
工事材料表
20AT-X-9401
Installation Materials
SC-502-J/E
20AY-X-9404
SC-501-J/E
20AY-X-9401
Spare Parts List for
フラッシュマウントキット
20AY-X-9403
Hatai
Page
Page
Page
Page
Page
表示部
IN-1
Index