| Functional Details |
debounced from 500 ns to 25.5 ms (total of 16 selections) to eliminate extraneous noise or switch induced transients. Encoder input signals must be within
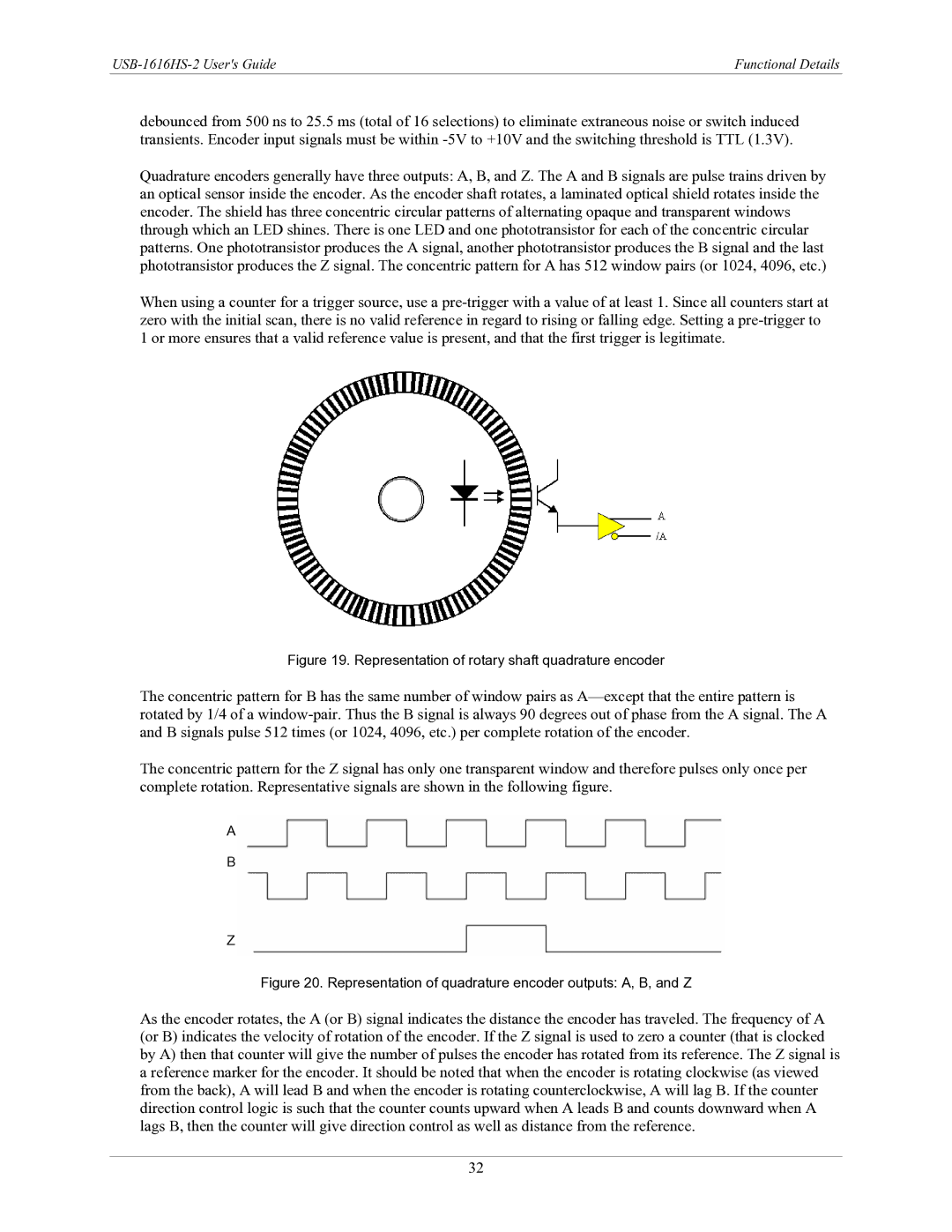
Quadrature encoders generally have three outputs: A, B, and Z. The A and B signals are pulse trains driven by an optical sensor inside the encoder. As the encoder shaft rotates, a laminated optical shield rotates inside the encoder. The shield has three concentric circular patterns of alternating opaque and transparent windows through which an LED shines. There is one LED and one phototransistor for each of the concentric circular patterns. One phototransistor produces the A signal, another phototransistor produces the B signal and the last phototransistor produces the Z signal. The concentric pattern for A has 512 window pairs (or 1024, 4096, etc.)
When using a counter for a trigger source, use a
Figure 19. Representation of rotary shaft quadrature encoder
The concentric pattern for B has the same number of window pairs as
The concentric pattern for the Z signal has only one transparent window and therefore pulses only once per complete rotation. Representative signals are shown in the following figure.
A
B
Z
Figure 20. Representation of quadrature encoder outputs: A, B, and Z
As the encoder rotates, the A (or B) signal indicates the distance the encoder has traveled. The frequency of A (or B) indicates the velocity of rotation of the encoder. If the Z signal is used to zero a counter (that is clocked by A) then that counter will give the number of pulses the encoder has rotated from its reference. The Z signal is a reference marker for the encoder. It should be noted that when the encoder is rotating clockwise (as viewed from the back), A will lead B and when the encoder is rotating counterclockwise, A will lag B. If the counter direction control logic is such that the counter counts upward when A leads B and counts downward when A lags B, then the counter will give direction control as well as distance from the reference.
32