APPENDIX B: DESCRIPTION OF HOMING AND ABORT LOOP PAGE 2/2
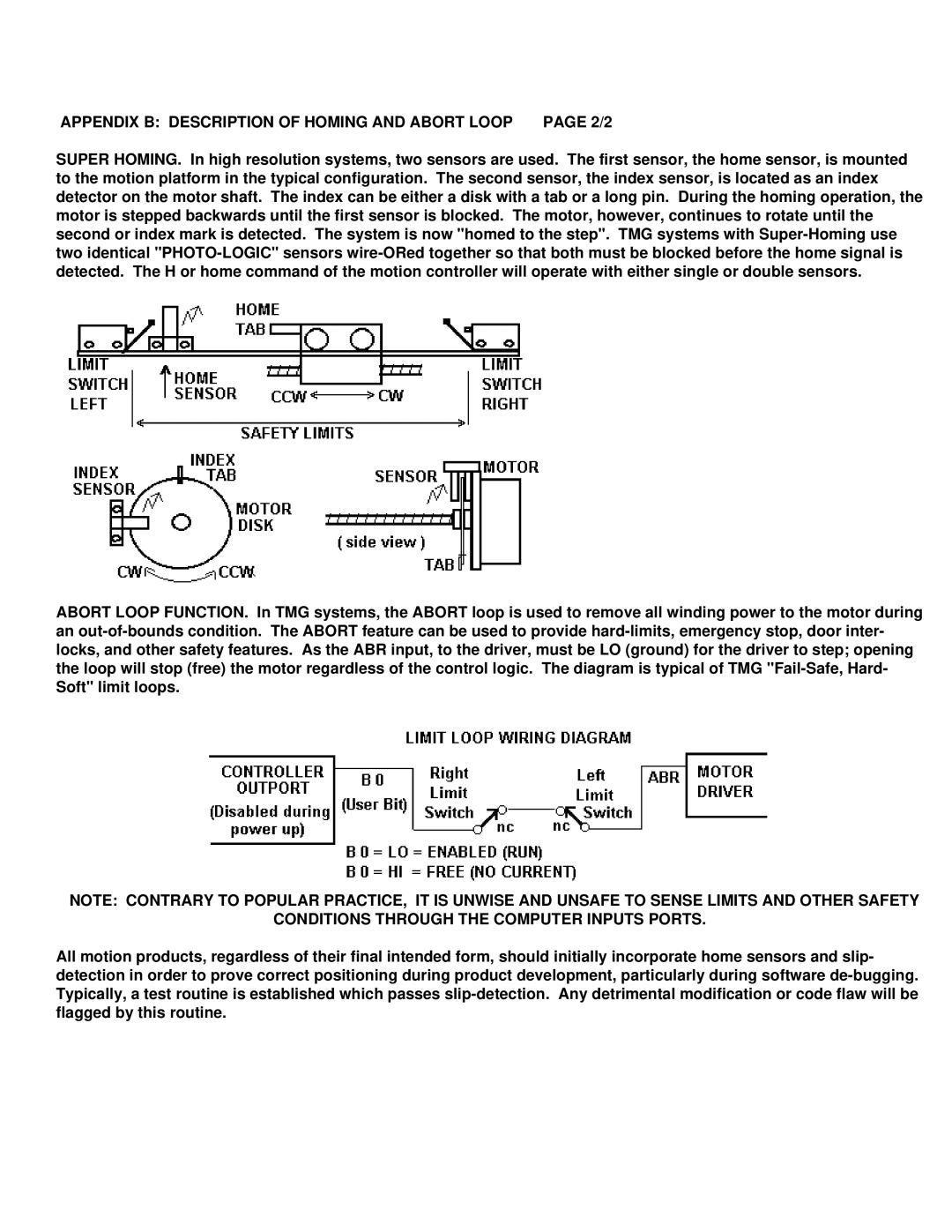
SUPER HOMING. In high resolution systems, two sensors are used. The first sensor, the home sensor, is mounted to the motion platform in the typical configuration. The second sensor, the index sensor, is located as an index detector on the motor shaft. The index can be either a disk with a tab or a long pin. During the homing operation, the motor is stepped backwards until the first sensor is blocked. The motor, however, continues to rotate until the second or index mark is detected. The system is now "homed to the step". TMG systems with
ABORT LOOP FUNCTION. In TMG systems, the ABORT loop is used to remove all winding power to the motor during an
NOTE: CONTRARY TO POPULAR PRACTICE, IT IS UNWISE AND UNSAFE TO SENSE LIMITS AND OTHER SAFETY
CONDITIONS THROUGH THE COMPUTER INPUTS PORTS.
All motion products, regardless of their final intended form, should initially incorporate home sensors and slip- detection in order to prove correct positioning during product development, particularly during software