22 | Barracuda 36ES2 Product Manual, Rev. B |
6.2.1Conducted noise immunity
Noise is specified as a periodic and random distribution of frequencies covering a band from DC to 10 MHz. Maximum allowed noise values given below are peak to peak measurements and apply at the drive power con- nector.
+5 | V | = | 150 mV pp from 0 to 100 kHz and 100 mV pp from 100 kHz to 10 MHz |
+12 | V | = | 150 mV pp from 0 to 100 kHz and 100 mV pp from 100 kHz to 10 MHz |
6.2.2Power sequencing
The drive does not require power sequencing. The drive protects against inadvertent writing during
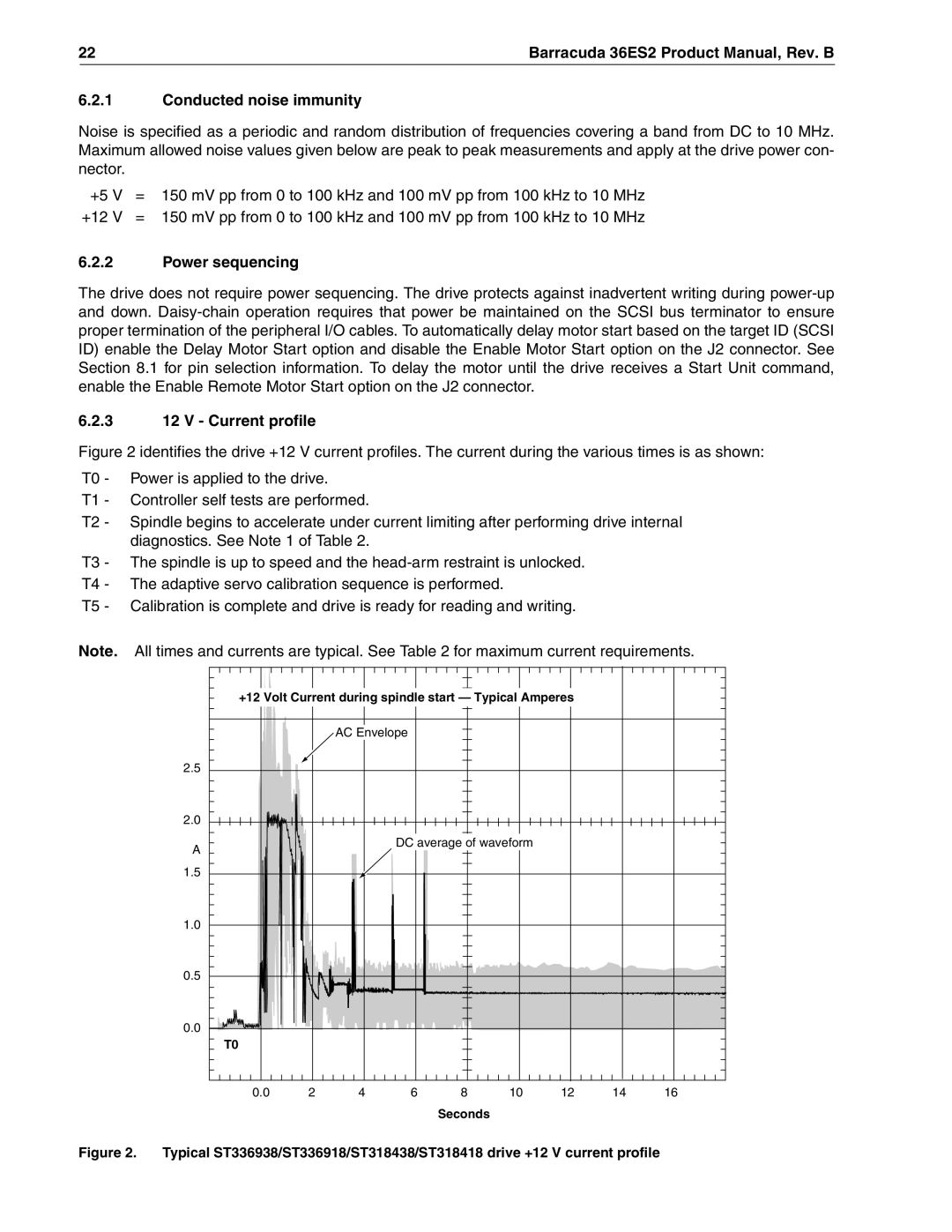
6.2.312 V - Current profile
Figure 2 identifies the drive +12 V current profiles. The current during the various times is as shown:
T0 - Power is applied to the drive.
T1 - Controller self tests are performed.
T2 - Spindle begins to accelerate under current limiting after performing drive internal diagnostics. See Note 1 of Table 2.
T3 - The spindle is up to speed and the head-arm restraint is unlocked.
T4 - The adaptive servo calibration sequence is performed.
T5 - Calibration is complete and drive is ready for reading and writing.
Note. All times and currents are typical. See Table 2 for maximum current requirements.
+12 Volt Current during spindle start — Typical Amperes |
|
| ||||||
|
| AC Envelope |
|
|
|
|
| |
2.5 |
|
|
|
|
|
|
|
|
2.0 |
|
|
|
|
|
|
|
|
A |
|
| DC average of waveform |
|
|
| ||
|
|
|
|
|
|
|
| |
1.5 |
|
|
|
|
|
|
|
|
1.0 |
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
T0 |
|
|
|
|
|
|
|
|
0.0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
|
|
|
| Seconds |
|
|
|
|