USER’S Manual
Table of Contents
OFF-LINE Operation
Mechanical Installation
Electrical Installation Hazardous Area Installation
ON-LINE Operation
6.1
Section and Title
List of Illustrations
List of Tables
Changes for Issue 1, October
Page
Contents
Introduction
Section Contents
Basic Model
MXC
Product Description
Product Support
Configuration
XTC Communicator
OFF
Keypad Description
Display
Dedicated Keys
XTC Communicator
Function Keys
Loop Connection
MXC Software Version
Power
MXC Menu Screens and Parameter MAP
Major MXC Menu Screens
Parameter Map, MXC/Model
XTC Communicator
Test Equipment
Initial Transmitter SET-UP
Commissioning Transmitter on the Bench or in the Field
Test Equipment Needed
Bench Test Connections
Establishing Communication
Enter Transmitter
MXC Testing
Testing the TRANSMITTER, MXC, and the Loop
Initial Transmitter SET-UP
Transmitter Testing
Review Configuration Data
Loop Testing
Transmitter Function Blocks Sensor Input
Pusp
Checking Transmitter Output
Initial Transmitter SET-UP
Receipt of Shipment
Installation
Equipment Delivery and Handling
Factory Shipment
Environmental Considerations
Installation Considerations
Mechanical
Operating Mode and Network
Transmitter Operating Mode and Network Type
Electrical
Digital Mode
Analog Mode
Network for Non-Hazardous Locations See 250
Point-To-Point Network Analog Mode
Multi-Drop Network Digital Mode
Operating
Power Supply Requirements
Multi-Drop Network
Point-To-Point Network
Cable Capacitance
Cable Capacitance and Maximum Length
Maximum Cable Length Calculation
Network Junctions
Field Instrument Capacitance
Connection of Miscellaneous Hardware
Safety Barriers
Determine Sensor Cable Requirements
10 2-Wire RTD Accuracy Limitation
Shielding and Grounding
Pipe Mounting
Mechanical Installation
Installation
Dimensions, Mounting Bracket for Model
X02822S0
Model 344 Mounting Configurations with Supplied Bracket
Flat Surface Mounting
Direct Mounting to Process
Transmitter-To-Process Mounting
Sensor Assembly
Local Digital Meter Installation, Repositioning and Removal
Digital Meter Orientation and Mounting Hardware
10 Digital Meter Repositioning and Removal
Conduit
Electrical Conduit and Cable Installation
11 Conduit Drain and Explosion Proof Installations
Cables
Access to Transmitter Terminal Compartment
Electrical Installation
12 Signal Loop , Sensor, MXC and Test Terminals
13 Model 344 Sensor Wiring
Thermocouple And Extension Grade Wire Characteristics
EXPLOSION-PROOF Installation
Hazardous Area Installation
Installation
ON-LINE and OFF-LINE Operation
Using the MXC for Configuration
ON-LINE Operation
V I D 2 1 0 3 0 0 0 0 3 C Tag TTC 101 ADD
Sensor Input Block
Method 1 The Tell
Operator Display Block
Transmitter ID Block
Output Block
Alarm Block
ON-LINE and OFF-LINE Operation
1.7 A/M Transfer Block
Setpoint Track and Hold Block
Controller Block
End or Review Configuration
Select Block to Edit Sensor Input Prev Next END SEL ECT
Downloading a Configuration
ON-LINE and OFF-LINE Operation
Local Pushbutton Operation
Local Transmitter Operation
ENG
Display Functions
CEL, OHMS, MV, KELV, RANK, Fahr
ON-LINE and OFF-LINE Operation
Ranging Controller OFF
ON-LINE and OFF-LINE Operation
Local Pushbutton
Damping Adjustment Controller
OFF
AUTO/MANUAL, Setpoint
Valve Adjustments Controller
UM344-2 August
ON-LINE and OFF-LINE Operation
ON-LINE and OFF-LINE Operation
Quick Access Key Operation
Enter Zoom Value END TER
NEW Setpoint
OFF-LINE Operation
Using Off-Line Operations to Access an Archive
ERROR! Archive Type Doesnt Match the Transmitter Type Cont
Using an Archive in On- Line Memory
ON-LINE and OFF-LINE Operation
Press END to return to the previous screen
ON-LINE and OFF-LINE Operation
Calibration
Calibration and Maintenance
Equipment Required
Transmitter Normally Configured for Analog Mode
Transmitter Analog Output DAC Calibration
Pressing Enter will SET Transmitter Output to
Field Calibration Connections
Transmitter Normally Configured for Digital Mode
3.1 RTD/OHM Calibration Check
3 RTD/OHM Type Input Calibration
Press Cont F4. MXC will display
Calibration and Maintenance
Press Cont F4 to calibrate
Thermocouple/Millivolt Calibration Check
Thermocouple/Millivolt Type Input Calibration
Calibration and Maintenance
Narrow Millivolt Calibration
Narrow/Wide Millivolt Calibration
Wide Millivolt Calibration
Apply 103.00 mV to mV+ 1 and mV-3
Tool and Equipment Requirements
Preventive Maintenance
Transmitter Exterior Inspection
Transmitter Exterior Cleaning
Transmitter Enclosure Interior Inspection
Preliminary Troubleshooting
Troubleshooting
Transmitter Calibration
Diagnostic Messages
Troubleshooting
MXC
Self-Diagnostics Troubleshooting
Message No Transmitter Found
Communication Warning Messages
Possible Cause Corrective Action
Message No Transmitter Found
Message Communication Error
Symptom Zero or Low Output
Possible Transmitter Output Problems
Message Field Device Malfunction
Symptom High Output
Possible Cause Corrective Action
Diagnosing a Defective Digital LCD Meter
Symptom Erratic Output
NON-FIELD-REPLACEABLE Items
Enclosure Thread Lubrication
Removal
Assembly Removal and Replacement
Electronics Module Removal and Replacement
Replacement
Recommended Spare and Replacement Parts
Maintenance Records
Product Support
Software Compatibility
Packaging
Material Safety Data Sheet
Return Shipment
To Return Equipment
Calibration and Maintenance
Circuit Description
Electronics Assembly
Model 344 Electronics Module Block Diagram
Thermocouple/Millivolt TC/mV Input
Theory of Operation
2 RTD/OHMS Input
Analog Switch is turned on enabling the 52 μA sink circuit
Communication Format
Signal Conversion
Model Designation
Model Designation and Specifications
Model 344 Model Designation
General Accessories
Accessories
Thermal Sensors
Model Designation and Specifications
Typical TC and RTD Thermowell Assemblies without Heads
Thermocouple Wire
Functional and Performance
Specifications
Sensors Type, Range, Span, and Accuracy
Model Designation and Specifications
Digital Accuracy + D/A Converter Accuracy
Two-Wire Cable
Environmental
Sensor Inputs
Baseefa
Hazardous Area Classification
Model Designation and Specifications
Model Designation and Specifications
Precautions English
CSA Hazardous Locations Precautions
Précautions Français
Model Designation and Specifications
Glossary
Glossary
Glossary
Glossary
Glossary
Operator Display Block
Appendix a Function Block Descriptions
Sensor Input Block
RTD PT 100 OHM DIN, PT 100 OHM US
DD/MM/YY
Transmitter ID Block
Output Block
Setpoint Track and Hold Block
Alarm Block
A/M Transfer Block
Manual
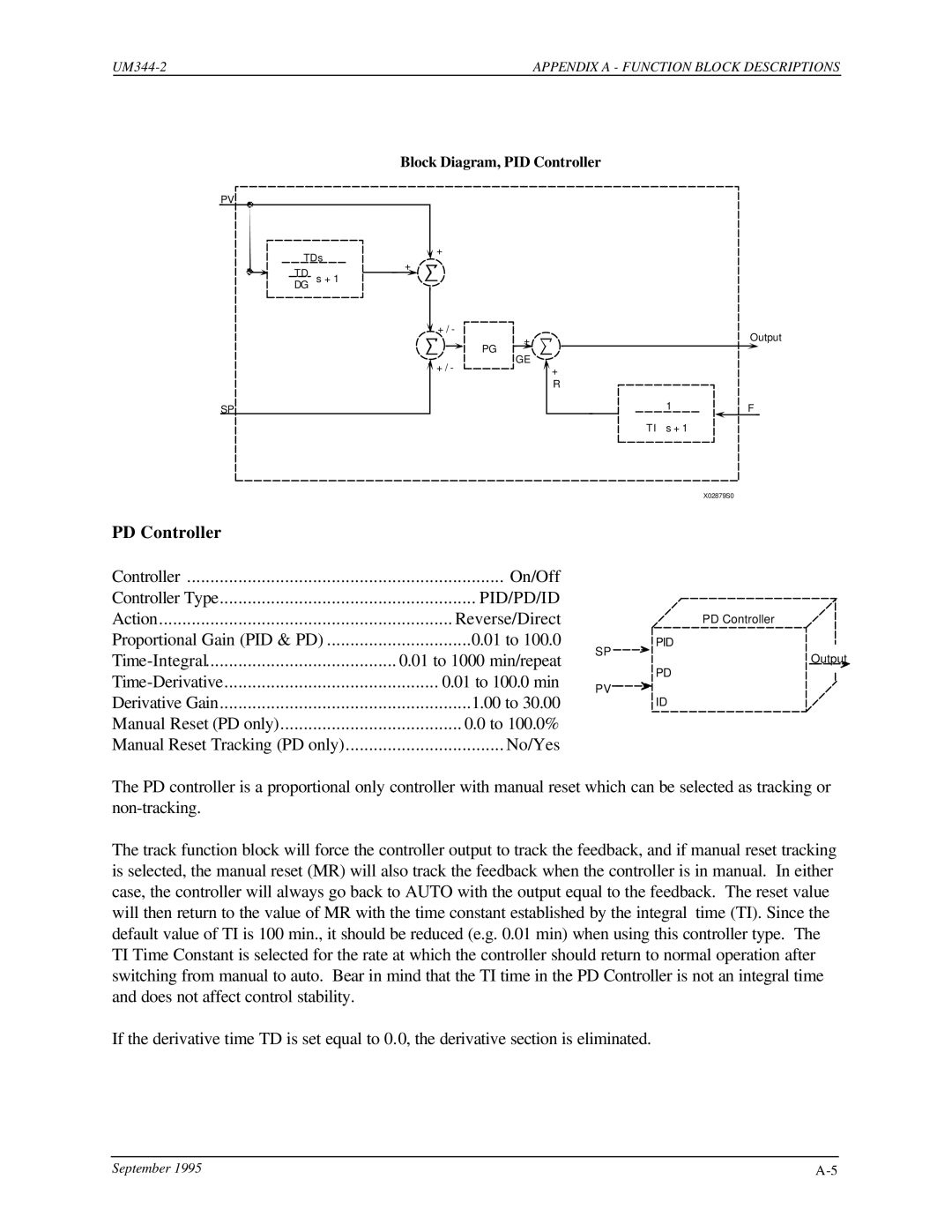
Controller Block
PID/PD/ID
Auto
PD Controller
ID Controller
If MRT = YES
Operator Display Block
Function Block Summary
Sensor Input Block
RTD
Ascii character tag e.g., CEL, Fahr
SP Track & Hold Block
Alarm Block
Transmitter ID Block
Output Block
Temperature Controller Function Blocks
Appendix a Function Block Descriptions
Appendix B Hazardous Area Installation Drawings
Appendix B Hazardous Area Installation Drawings
Appendix B Hazardous Area Installation Drawings
Figure B-2 Model 344, Barrier Selection Dwg -3441, Sheet 2
Appendix B Hazardous Area Installation Drawings
Appendix B Hazardous Area Installation Drawings
Appendix B Hazardous Area Installation Drawings
Moore Products CO
Warranty
Warranty
Parts List
XTC Model 344 Temperature TRANSMITTER-CONTROLLER
Additional Material
Involved USER’S Manual
Hart
Ex N Installation Condition