|
|
|
|
|
|
|
|
|
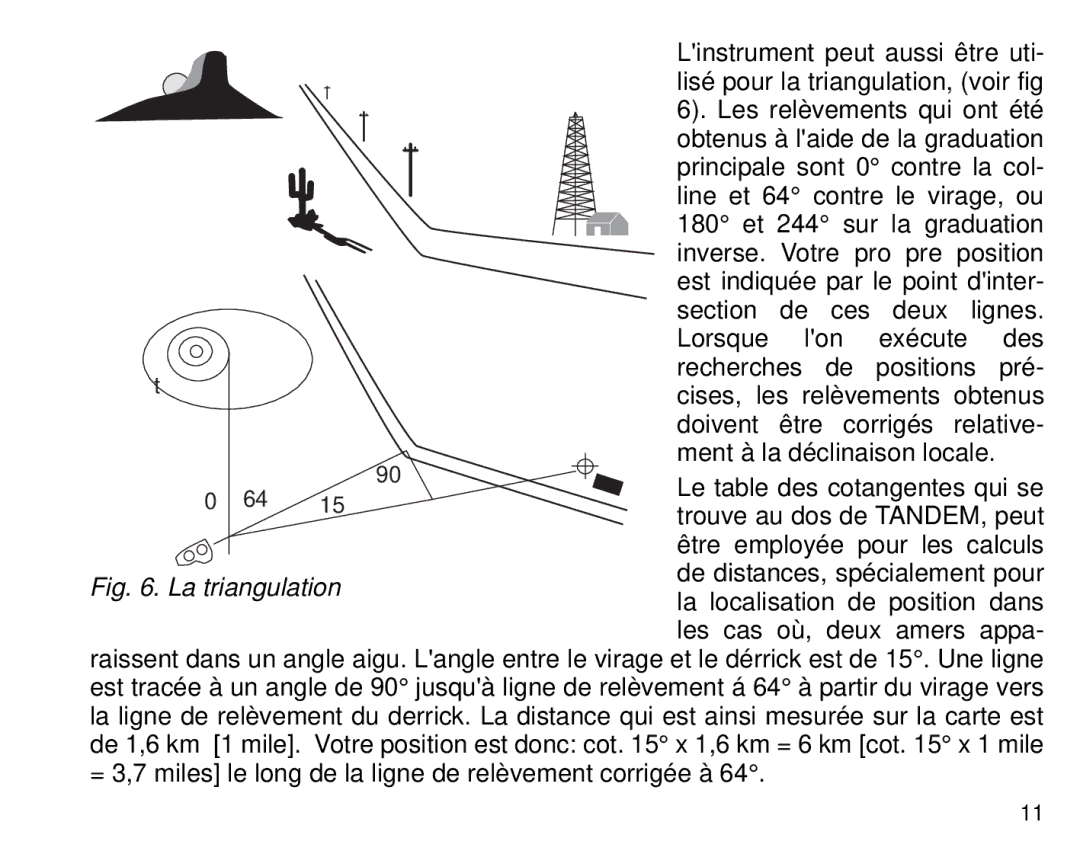
| L'instrument peut aussi être uti- | |||
|
|
|
|
|
|
|
|
|
| lisé pour la triangulation, (voir fig | |||
|
|
|
|
|
|
|
|
|
| 6). Les relèvements qui ont été | |||
|
|
|
|
|
|
|
|
|
| obtenus à l'aide de la graduation | |||
|
|
|
|
|
|
|
|
|
| principale sont 0° contre la col- | |||
|
|
|
|
|
|
|
|
|
| line et 64° contre le virage, ou | |||
|
|
|
|
|
| ||||||||
|
|
|
|
|
|
|
|
|
| 180° et 244° sur la graduation | |||
|
|
|
|
|
|
|
|
|
| inverse. Votre pro pre position | |||
|
|
|
|
|
|
|
|
|
| est indiquée par le point d'inter- | |||
|
|
|
|
|
|
|
|
|
| section de ces deux lignes. | |||
|
|
|
|
|
|
|
|
|
| Lorsque | l'on | exécute | des |
t |
|
|
|
|
|
|
|
|
| recherches de | positions | pré- | |
|
|
|
|
|
|
|
|
| cises, les | relèvements obtenus | |||
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
| doivent être corrigés relative- | |||
|
|
|
|
| 90° |
|
|
|
| ment à la déclinaison locale. |
| ||
|
|
|
|
|
|
|
|
| |||||
0° | 64° | 15° |
|
|
|
| Le table des cotangentes qui se | ||||||
|
|
|
| ||||||||||
|
|
|
|
| |||||||||
|
|
|
|
| trouve au dos de TANDEM, peut | ||||||||
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
| être employée pour les calculs | |||
Fig. 6. La triangulation |
|
|
|
|
| de distances, spécialement pour | |||||||
|
|
|
|
| la localisation de position dans | ||||||||
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
| les cas où, deux amers appa- | |||
raissent dans un angle aigu. L'angle entre le virage et le dérrick est de 15°. Une ligne est tracée à un angle de 90° jusqu'à ligne de relèvement á 64° à partir du virage vers la ligne de relèvement du derrick. La distance qui est ainsi mesurée sur la carte est de 1,6 km [1 mile]. Votre position est donc: cot. 15° x 1,6 km = 6 km [cot. 15° x 1 mile = 3,7 miles] le long de la ligne de relèvement corrigée à 64°.
11