NEW Zealand
Document Number LT0273 Issue 1.5 24 March
SSL Listing Number Afp1446
FPA NZ Listing number VF/117 AS/NZS 3548 1995 Class a
Trademarks
NON-DISCLOSURE Agreement
END User Liability Disclaimer
Amendment LOG
Table of Contents
11.1
Analogue Loop Design Considerations
Device Processing
MX4428 MXP Engineering /Technical Manual Document LT0273
Chapter Introduction
Associated Documentation
About this Manual
Product Related
Standard Related
Specifications
Terminology
Chapter Responder Loop Design Considerations
MXP Application Considerations
Logical Responders
Logical Responders
NLR
Point Allocation For Various Numbers of Logical Responders
= Base Address of Responder = Device Number
Point to Circuit to Zone Mapping
Implications to System Design
Device Information and Programming
MX Devices
Device Types
814P Analogue Photoelectric Smoke Detector
814I Analogue Ionisation Smoke Detector
814H Analogue Heat Detector
814PH Analogue Photoelectric Smoke Detector + Heat Detector
Contact Input Module CIM800
814CH Analogue CO Carbon monoxide Detector + Heat Detector
Mini Input Module MIM800
Mini Input Module MIM801
Sounder Base 814SB and MkII Sounder Base
Loop Powered Sounder LPS800
Sounder Notification Module SNM800
Short Circuit Isolator 5BI
Device Function
Compatible Device Summary
Overview
Device Handling Capability
Device Quantities and Loading
Cable type Cable length
AC Loading
Maximum Cable Lengths
Ii Calculate AC Load
Isolator Base Loading
Example
Calculate DC Load
Relay output
Circuit alarm
Point alarm
Output Control
Programming
Mode Functional Base Control Remote LED Control
Output State Under Exceptional Circumstances
Conversion
Detector Parameter Settings Summary
Detector Default Alternate Range Comments
Prealarm
Address & LED Blink Programming
Device Installation
Precautions
Mounting
MX4428 Programming
3 MX4428 Programming Options 814H
2 814H Specifications
814H Heat Detector
General
MX4428 Reference Description Default
Parameter Description Default
814I Ionisation Smoke Detector
2 814I Specifications
3 MX4428 Programming Options
Tracking Limit
8XXI Upper
3 MX4428 Programming Options 814PH/814P
2 814PH & 814P Specifications
Page
Parameter Description Default
8XXPH Track
8XXPH Upper
8XXPH Dirty
Alert Limit
10 814CH Carbon Monoxide + Heat Detector
10.2 814CH Specifications
10.3 MX4428 Programming Options 814CH
38ppm default
Remote Indicator Wiring
MUB and 5B Wiring
MUB Universal Base
5BI Isolator Base
Specifications
5BI Wiring
814RB Relay Base
Relay Base
814SB Sounder Base
24VDC
Mkii Sounder Base
Temporal 3 ISO8201 Evacuate
16 MIM800 and MIM801 Mini Input Modules
16.2 MIM800 / MIM801 Specifications
Normally Closed
Field Wiring
16.4 MX4428 Programming Options MIM800 / MIM801
Normally Open
16.5 MX4428 Programming Options MIM801
CIM800 Contact Input Module
17.2 CIM800 Specifications
17.4 MX4428 Programming Options CIM800
Clean Contact Device Connection to CIM800
Normally Closed Parameter Description Default
Normally Open Parameter Description Default
18.2 MX4428 Programming Options CP820
CP820 Manual Call Point
19.2 MX4428 Programming Options FP0838 / FP0839
19 FP0838 / FP0839 Manual Call Points
DIM800 Detector Input Monitor
DIM800 Field Wiring
20.2 DIM800 Specifications
20.4 MX4428 Programming Options DIM800
20.3 DIM800 Detector Compatibility
Conventional Detector Compatibility
21.3 RIM800 Field Wiring
21.2 RIM800 Specifications
21 RIM800 Relay Interface Module
21.4 MX4428 Programming Options RIM800
22 SNM800 Sounder Notification Module
22.2 SNM800 Specifications
22.4 MX4428 Programming Options SNM800
22.3 SNM800 Field Wiring
EOL ?
23.2 LPS800 Specifications
23 LPS800 Loop Powered Sounder Module
23.3 MX4428 Programming Options LPS800
LPS800 Field Wiring
VLC-800MX Vesda Lasercompact
24.2 VLC800 Specifications
24.3 MX4428 Programming Options VLC800
Flowswitch
AVF / RAD / SAD / Flowswitch Delays
Time Action
This page Intentionally Left Blank
Analogue Loop Design Considerations
3 AS1670.1 Design Requirements
Analogue Loop Configuration Selection
Loop Fault Tolerance
Lines & Loops
Analogue LOOP/LINE Layouts
Line Mode
Loop Design with Short Circuit Isolators
MXP
Spurs
Star Connection of Analogue Lines
Star Connection on MXP
Cable Selection Considerations
DC Considerations
AC Requirements
6MECHANICAL Considerations
Noise Considerations
Chapter MXP Current Consumption
Itot
Alarm Current
1THEORY
PCE
Heat Loss
Quiescent Current
This page Intentionally Left Blank
Event LOG and Status AT MX4428
CO CV CO TV
Returned Analog Values
Type
ROR SLV
Event on MXP Event Logged Event Logged on return to Normal
Fault and Alarm Event LOG
This page Intentionally Left Blank
Chapter MXP Technical Description
1GENERAL
Microprocessor & Logic Circuitry
Block Diagram
Power On Reset & Watchdog Circuits
Circuit Description
MXP Block Diagram
MXP Power Supply
3.2 40V ISO
3.1 +VS Circuitry
3.3 24V ISO
Disconnect Relay Driver
4 MX4428 Loop Interface
3.4 +5V ISO & +5V Batt
Loop Disconnect Circuitry
4.3 MX4428 Communications Circuitry
Analogue Loop Interface
Page
Data Reception
Open Circuit Fault Handling
Short Circuit Fault Handling
Data Transmission
3 40V ISO Supply Current Limit Adjustment
MXP Adjustments
1 40V ISO Supply Voltage Adjustment
TX Data Voltage Adjustment
Indication Condition
MXP LED Indications
CAP,CERAMIC,MONOLITHIC,100N,50V,P2.54MM
Parts List
RELAY,OMRON G6A-274P-24VDC
This page Intentionally Left Blank
Chapter MXP Diagnostic Terminal
Selecting Points for Monitoring
MXP Diagnostic Terminal Operation
Menu of Commands
Introduction
Heat Sensor of 814H, 814PH, and 814CH
Displaying Device Analogue Values CV, TV, ETC
SPA
CPA
4.5 MIM800 Mini Input Module
Photo Sensor of 814PH
Carbon Monoxide Sensor of 814CH
4.4 814I Ionisation Detector
ST Status Command
RS Command Reset
Analog Loop Diagnostics
TC Command Total Counts
EC Command Error Counts
CA Command Change address
DP Command Diagnostic Poll
8 MX4428 Diagnostics
Advanced Commands
MXP Event LOG
Flash Programming
Procedure
Files Required
Flash Information
MXP
Chapter Device Processing
Step Limiting Filter
Exponential Filter
If ADJ SL then ADJ = SL
Conversion of Detector Reading to C
Heat Processing
Heat Processing Diagram
Smartsense Processing
Photo Processing
Smartsense Enhancement
Fastlogic Processing
Enhancement of smoke reading for temperature rate of rise
CO Processing
Calibration and Temperature Compensation
CO Processing
Enhancement
Ionisation Detector Processing
Ionisation Processing
MIM800
MIM801
P2=0 P2 not =
EOL R
P5=0 P5 not =
DIM Model
Input Condition Mode
DIM Processing
Load Graph
SNM Processing
RIM Processing
Correct Relay Position AI0, AI1 Condition
LPS Processing
VLC800 Processing
ELD and Position Monitoring
Autotest and System Test
Zone Alarm Test
Zone Fault Test
Filter Step Limits
Slow Point Test
NON Latching Test Mode
Commission Mode
Fast Point Test
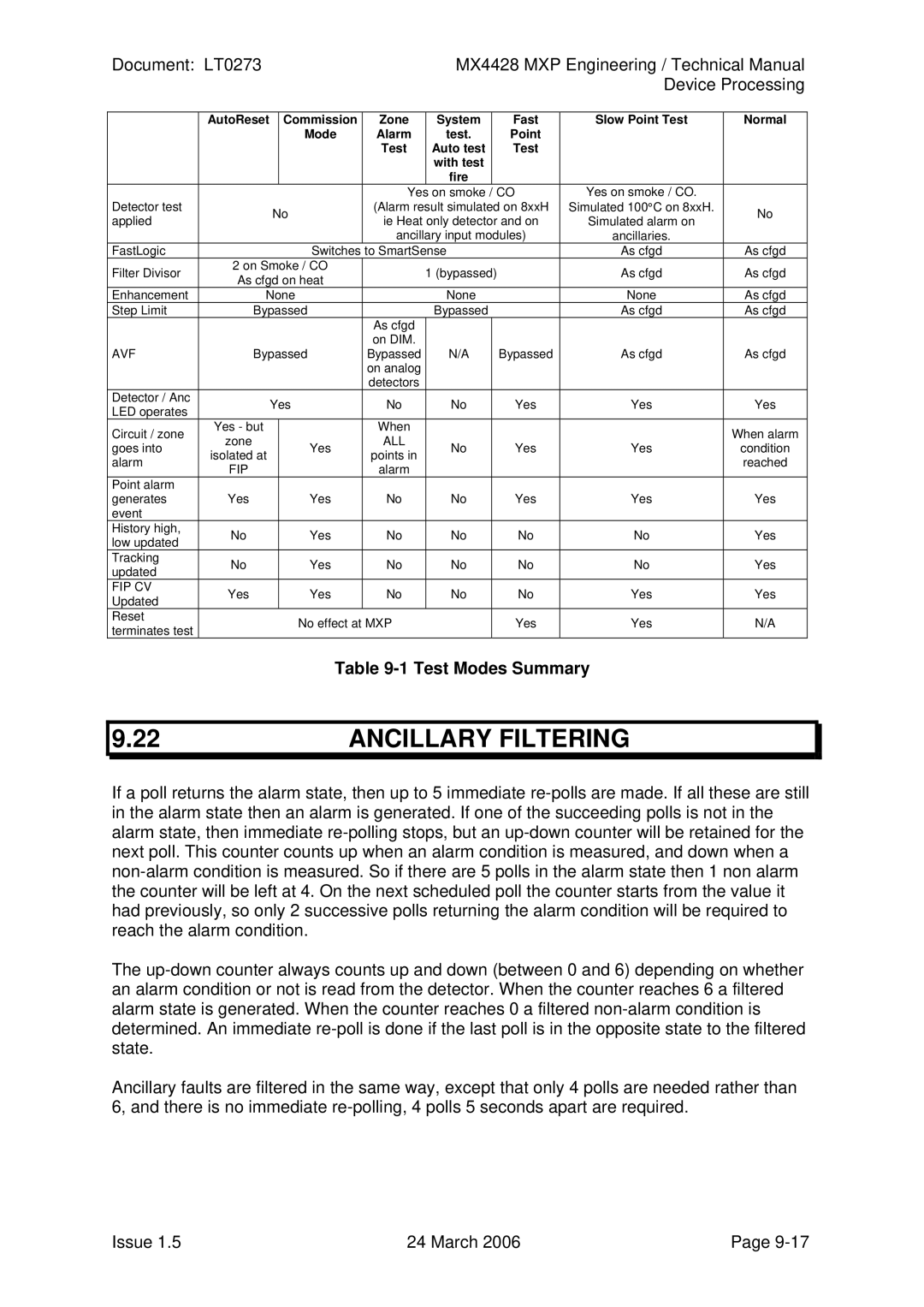
Test Modes Summary
Ancillary Filtering
Reset of Ancillary Input Device
23RESET
Reset of Addressable Detector
Reset of DIM Module
Device Initialisation and Polling
Software Versions
Version Features
Chapter MXP Loop Filter Board
10.2FITTING
USE of MXP Loop Filter Board
10.3DIAGNOSTICS
This page Intentionally Left Blank