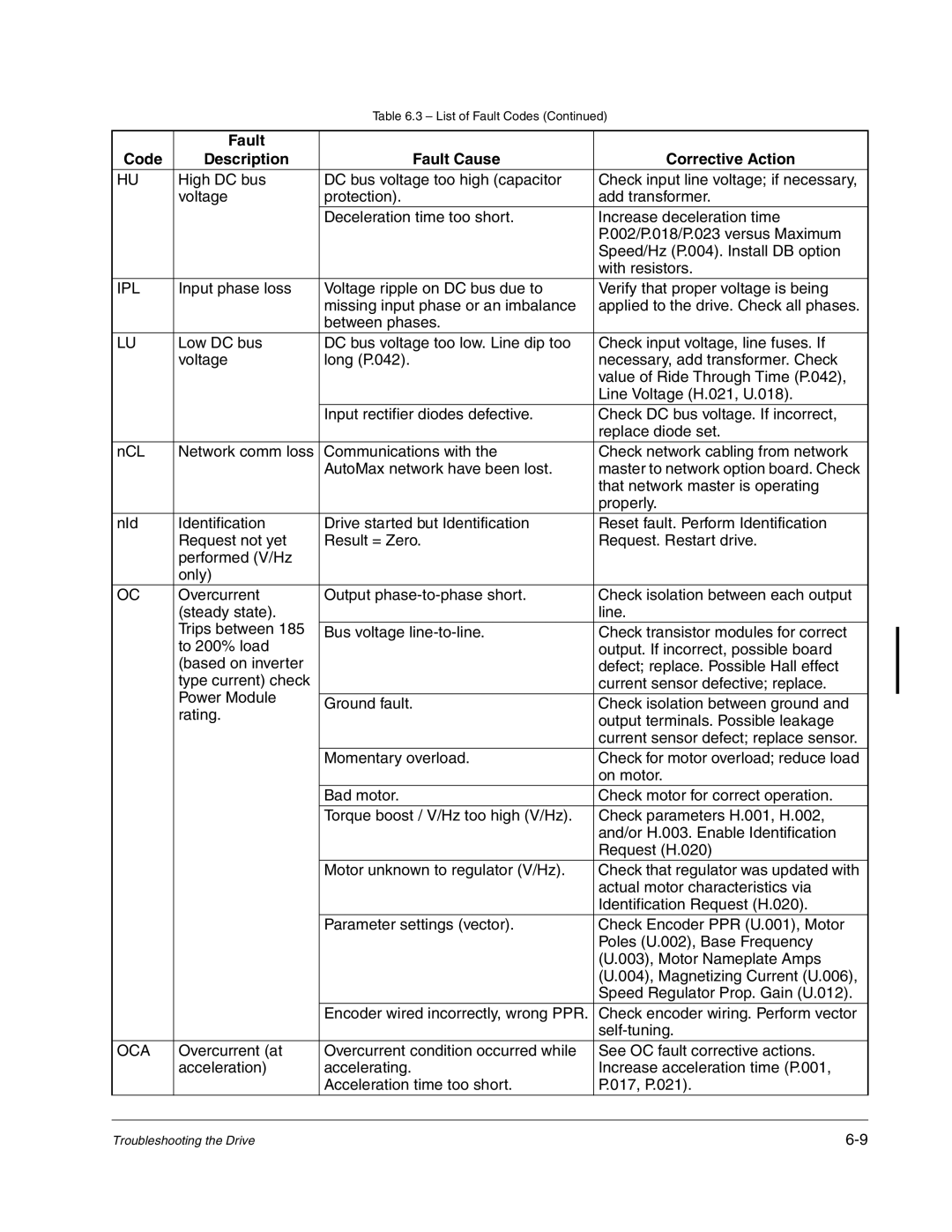
Table 6.3 – List of Fault Codes (Continued)
| Fault |
|
|
Code | Description | Fault Cause | Corrective Action |
HU | High DC bus | DC bus voltage too high (capacitor | Check input line voltage; if necessary, |
| voltage | protection). | add transformer. |
|
| Deceleration time too short. | Increase deceleration time |
|
|
| P.002/P.018/P.023 versus Maximum |
|
|
| Speed/Hz (P.004). Install DB option |
|
|
| with resistors. |
IPL | Input phase loss | Voltage ripple on DC bus due to | Verify that proper voltage is being |
|
| missing input phase or an imbalance | applied to the drive. Check all phases. |
|
| between phases. |
|
LU | Low DC bus | DC bus voltage too low. Line dip too | Check input voltage, line fuses. If |
| voltage | long (P.042). | necessary, add transformer. Check |
|
|
| value of Ride Through Time (P.042), |
|
|
| Line Voltage (H.021, U.018). |
|
| Input rectifier diodes defective. | Check DC bus voltage. If incorrect, |
|
|
| replace diode set. |
nCL | Network comm loss | Communications with the | Check network cabling from network |
|
| AutoMax network have been lost. | master to network option board. Check |
|
|
| that network master is operating |
|
|
| properly. |
nId | Identification | Drive started but Identification | Reset fault. Perform Identification |
| Request not yet | Result = Zero. | Request. Restart drive. |
| performed (V/Hz |
|
|
| only) |
|
|
OC | Overcurrent | Output | Check isolation between each output |
| (steady state). |
| line. |
| Trips between 185 | Bus voltage | Check transistor modules for correct |
| to 200% load |
| output. If incorrect, possible board |
| (based on inverter |
| defect; replace. Possible Hall effect |
| type current) check |
| current sensor defective; replace. |
| Power Module |
|
|
| Ground fault. | Check isolation between ground and | |
| rating. | ||
|
| output terminals. Possible leakage | |
|
|
| |
|
|
| current sensor defect; replace sensor. |
|
| Momentary overload. | Check for motor overload; reduce load |
|
|
| on motor. |
|
| Bad motor. | Check motor for correct operation. |
|
| Torque boost / V/Hz too high (V/Hz). | Check parameters H.001, H.002, |
|
|
| and/or H.003. Enable Identification |
|
|
| Request (H.020) |
|
| Motor unknown to regulator (V/Hz). | Check that regulator was updated with |
|
|
| actual motor characteristics via |
|
|
| Identification Request (H.020). |
|
| Parameter settings (vector). | Check Encoder PPR (U.001), Motor |
|
|
| Poles (U.002), Base Frequency |
|
|
| (U.003), Motor Nameplate Amps |
|
|
| (U.004), Magnetizing Current (U.006), |
|
|
| Speed Regulator Prop. Gain (U.012). |
|
| Encoder wired incorrectly, wrong PPR. | Check encoder wiring. Perform vector |
|
|
| |
OCA | Overcurrent (at | Overcurrent condition occurred while | See OC fault corrective actions. |
| acceleration) | accelerating. | Increase acceleration time (P.001, |
|
| Acceleration time too short. | P.017, P.021). |
Troubleshooting the Drive |