Color DGPS/PLOTTER/SOUNDER Color GPS/PLOTTER/SOUNDER
00080937000
Safety Instructions
Table of Contents
Routes
Iii
Word to GP-1850WDF/1850WF Owners
Features
Foreword
Antenna Unit
System Configuration
Waas
What is WAAS?
Display unit
Operational Overview
Display Unit Controls
Remote Controller
Turning the Power On/Off
Inserting Mini Chart Card
Location of mini chart Card slot cover
Direction of mini chart card
Turning the power off
Adjusting Tone and Brilliance
Tone and brilliance adjustment window
Display abbreviations
Display modes plotter
Plotter Displays
Display modes Sounder display
Sounder Displays
Menu Operation, Soft Keys
Display setup 1 menu
Main menu
Time display window
Demonstration Display
Demo setting screen
Demo mode window
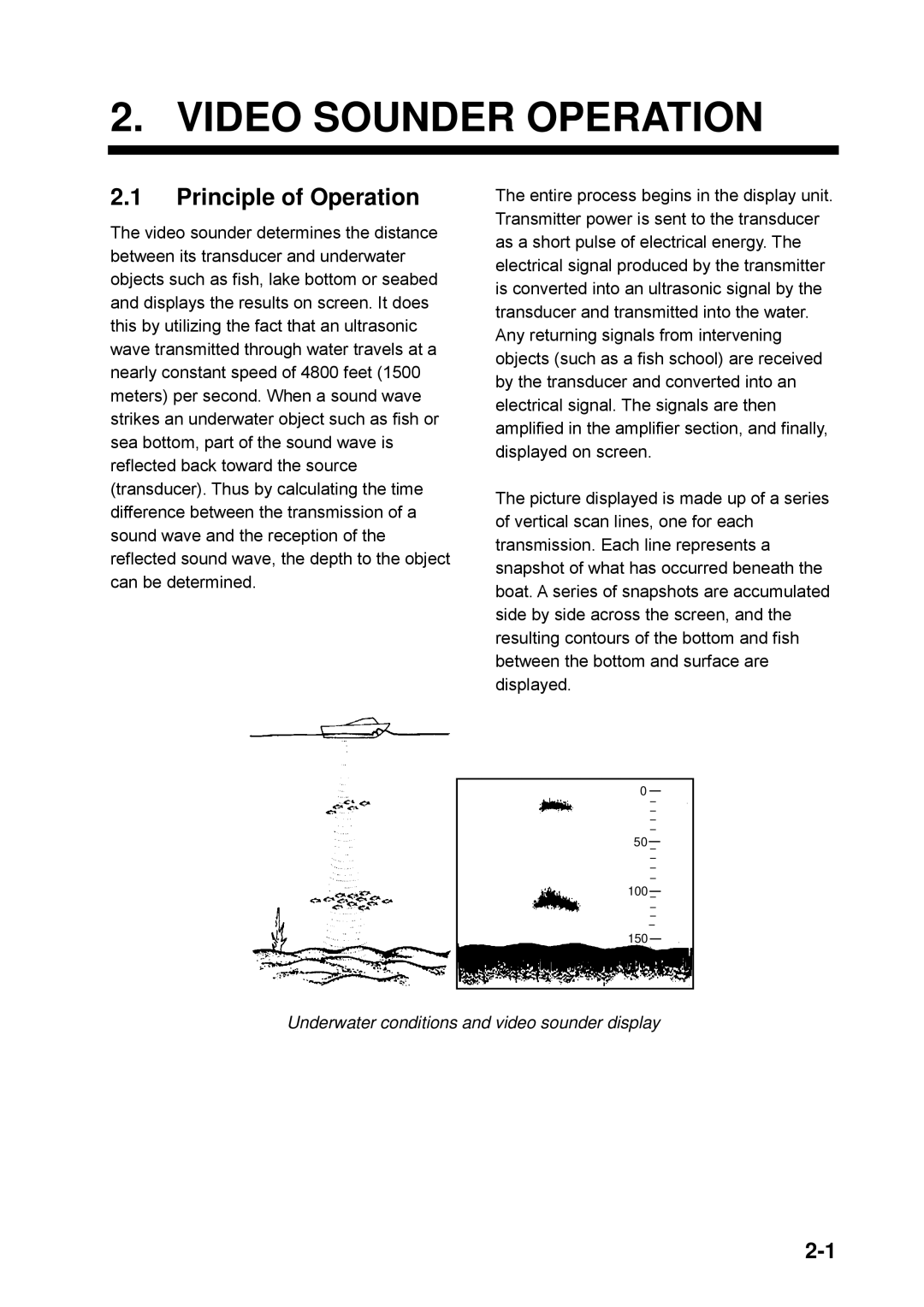
Underwater conditions and video sounder display
Video Sounder Operation
Principle of Operation
KHz picture
Sounder Display Description
Normal sounder display indications, markers
Sounder function window
Selecting sounder display mode
Marker-zoom display plus normal sounder display
Bottom-zoom display plus normal sounder display
Plotter/Sounder Display
Dual-frequency Display
Manual Sounder Operation
Automatic Sounder Operation
Range shifting
Adjusting the gain
Selecting display range
Suppressing Low Level Noise
Measuring Depth
Suppressing Interference
White Marker
Erasing Weak Echoes
Selecting Background and Echo Colors
Selecting Picture Advance Speed
Alarms
Zero line
Interpreting the Display
Minute mark
Fish school echoes
Surface noise/aeration
Surface noise/Aeration
Presentation Modes
Plotter Displays
North-up
Course-up
Shifting the Display
Cursor
Displaying Nav Information Window
Turning on the cursor, shifting the cursor
Mini Chart Cards
Selecting Chart Scale/Range
Indices and chart enlargement
Chart icons and their meanings
Chart symbols
Remarks on chart display
Sample chart Japan and South Korea Showing indices
Furuno chart symbols
Aid to navigation data
Port service icons Nav-ChartsTMcards
Enlarging an indication
Navigation Data Display
GPS satellite monitor display
Navigation data display
Steering Display
How to read the compass display
Beacon information display
Beacon information display
Setting the range of the XTE scale
How to read the XTE indication
XTE range setting window
Highway Display
Press the HIDE/SHOW key
Changing Operation Mode
Navigation Trip Distance
Selecting fishing 1, fishing 2 mode
Resetting trip distance
Track
Chart setup menu
Displaying Track
Stopping/Restarting Plotting of Track
Track Plotting Method, Interval
Changing Track Color
Track plotting method
Track color window
Track plotting interval
Changing Track Memory Capacity
Interval window
Track memory window
Erasing tracks by area
Erasing Tracks
Erasing tracks by color
Erasing all track
Entering Marks
Mark
Plotter display
Changing displays Plotter display
Video sounder display
Changing Mark Attributes
Changing displays Video sounder display
Mark/line window
Changing Mark Size
Chart details menu
Mark line window
Mark color window
Target Mark
Erasing Marks
Displaying Track and Mark Points
Entering Waypoints
Waypoints
Entering waypoints at own ship’s position
Entering waypoints at MOB position
Waypoint window
Waypoints menu
Mark shape selection window
Mark color selection window
Entering waypoints by range and bearing
Entering waypoints by latitude and longitude position
Erasing Individual Waypoints
Erasing waypoints by the cursor
Erasing waypoints through the waypoint list
Changing Waypoint Position on the Plotter Display
Changing Waypoint Data
Search window
Waypoint Mark Size
Searching Waypoints
Entering Routes
Routes
Entering routes through the route list
Route menu
Connect route window
Connecting Routes
Entering routes by the cursor
Inserting waypoints through the route list
Inserting, Removing Waypoints
Changing waypoints through the list
Edit route menu
Removing waypoints from routes
Inserting waypoints on the plotter display
Creating Track-based Routes
Route contents display
Save route menu
New route window
Erasing Routes
Navigating to Quick Points
Navigation
Selecting quick point entry method
Navigating to a single quick point
Navigating to Waypoints waypoint list
Navigating to Ports, Port Services
Plotter display
Sample port list southern Italy
Sample filling station locations southern Italy
Sample port service list
Navigate along specific leg of route
Following a Route
Restarting navigation
Navigate route waypoints in reverse order
Select speed for ETA window
Setting speed for ETA calculation
Switching waypoints
Canceling Navigation
Audio Alarm On/Off
Plotter Alarms
Alarm menu
Audio alarm window
Anchor Watch Alarm
Arrival Alarm
Proximity Alarm
XTE Cross Track Error Alarm
Speed Alarm
Alarm messages and their meanings
Alarm Information
Alarm messages
Formatting Memory Cards
Memory Card Operations
10-1
Download/upload menu
10-2
Saving Data to Memory Card
Saving data
Save Data message
Loading Data from Memory Card
Error messages
10-3
Data overwrite
10-4
Configuration
Waypoint/route
Mark/line
Chart Offset menu
Chart Setup Options menu
Customizing Your Unit
11-1
11-2
Chart Details menu
Chart details menu description
11-3
Display Setup 1 menu description
Display Options menu
Display setup 2 menu
Display Setup 2 menu description
11-4
Mag variation window
GPS Setup options menu
GPS Setup Options menu description
11.3 GPS/DGPS/TD Options menu
11-5
Geodetic datum window
11-6
DGPS/WAAS menu
DGPS/WAAS Setup Options menu
11-7
11-8
TD Setup menu
Displaying Loran C TDs
Displaying Decca TDs
System Setup soft key
Sounder Setup Options menu
Range Setup soft key
11-9
Echo Offset 200kHz, Echo Offset 50kHz
11-10
Seabed LVL 200kHz, Seabed LVL 50kHz
TVG concept
Setup Nmea Port 1 menu description
Configuration menu
Setup NMEA/DGPS Port 2 menu description
11-11
UPLOAD/DOWNLOAD Data menu
11-12
Upload/download menu
Display unit, rear view
Connection of GP-1850WDF/GP-1850WF to PC
11-13
Waypoint data format
Character available for comment
Route data format
11-14
Route comment format
End of sentence
Inserting Chart Card
Using C-MAP NT Model
Location of chart card slot cover
12-1
12-2
Cursor and Data Display
Objects window
Example of caution area window
12-3
Tidal Information
SET GO to Method window
12-4
Date window
12-5
Select Port Service window
Sample filling station locations
Make route window
Lighthouse appearance when sector info is off
Setting Chart Setup Options
12-6
Sector info
Depth info display
12-7
Memory, I/O test results
Displaying Program Number
12-8
Maintenance
Maintenance & Troubleshooting
Recommended maintenance program
13-1
Simple Troubleshooting
Replacement of Fuse, Battery
Simple troubleshooting plotter
13-2
Simple troubleshooting sounder
Error Messages
Error messages
13-3
13-4
Diagnostic Tests
Memory, I/O port test
Test menu
Keyboard test
13-5
Display test
Keyboard test
Remote controller test
Remote controller test
Clearing Memories
13-6
Menu Tree
Default settings shown in bold italic
Menu Tree
2 By soft key Next
GRI
Loran C Chains
Chain Location Code
Decca Chains
World Time
OLD HAWAIIAN-OA
Geodetic Chart List
This page is intentionally left blank
General
Coating Color
Index-1
Index
Indications
Index-2
Index-3
Index-4