• Operating power and current
Operating power is measured using 40 percent random seeks, 40 percent read/write mode (1 write for each 10 reads) and 20 percent drive idle mode.
• Idle mode power
Idle mode power is measured with the drive up to speed, with servo electronics active and with the heads in a random track location.
• Standby mode
During Standby mode, the drive accepts commands, but the drive is not spinning, and the servo and read/ write electronics are in
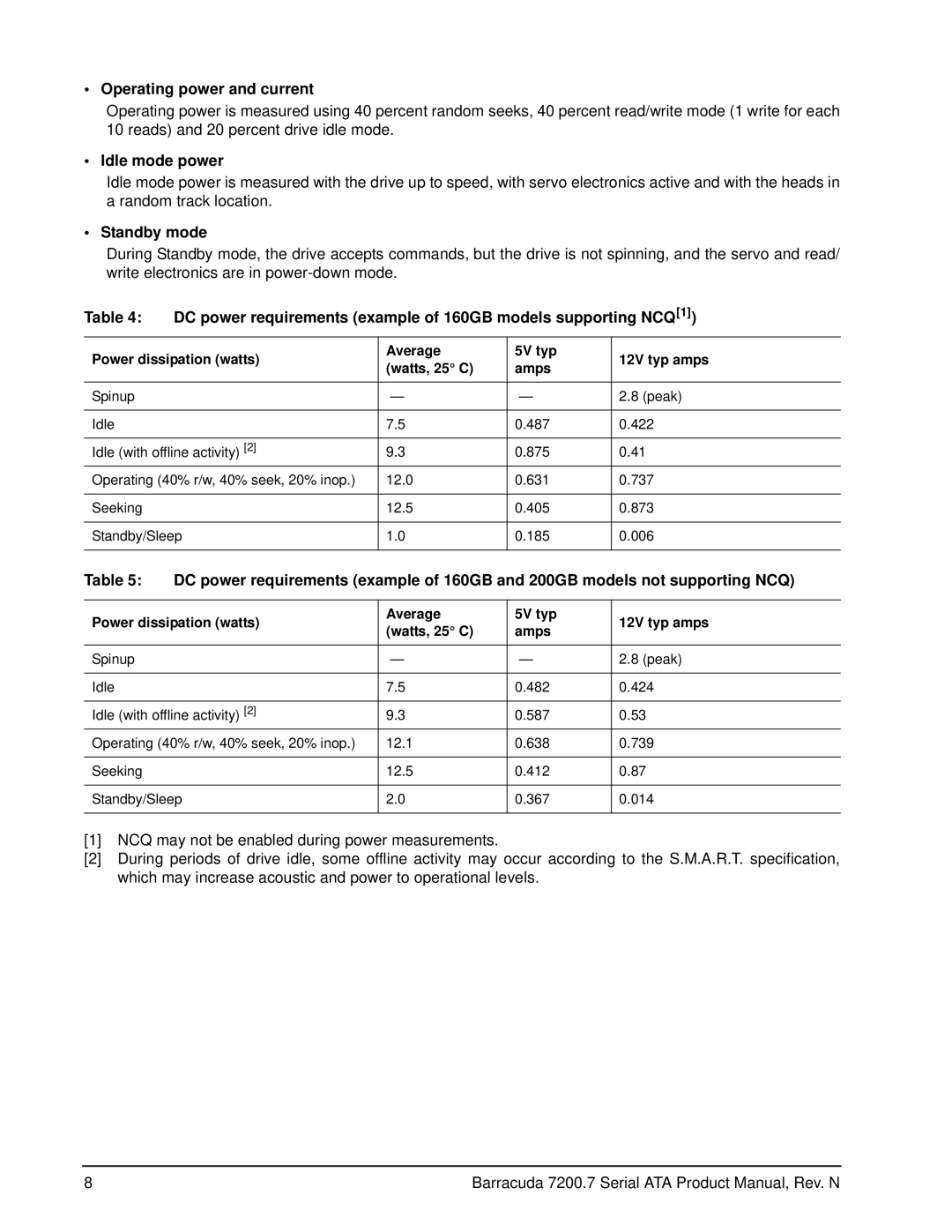
Table 4: DC power requirements (example of 160GB models supporting NCQ[1])
Power dissipation (watts) | Average | 5V typ |
| 12V typ amps |
(watts, 25° C) | amps |
| ||
|
|
| ||
|
|
|
|
|
Spinup | — | — | 2.8 (peak) | |
|
|
|
| |
Idle | 7.5 | 0.487 | 0.422 | |
|
|
|
| |
Idle (with offline activity) [2] | 9.3 | 0.875 | 0.41 | |
Operating (40% r/w, 40% seek, 20% inop.) | 12.0 | 0.631 | 0.737 | |
|
|
|
| |
Seeking | 12.5 | 0.405 | 0.873 | |
|
|
|
| |
Standby/Sleep | 1.0 | 0.185 | 0.006 | |
|
|
|
|
|
Table 5: | DC power requirements (example of 160GB and 200GB models not supporting NCQ) | ||||
|
|
|
|
|
|
Power dissipation (watts) | Average | 5V typ |
| 12V typ amps | |
(watts, 25° C) | amps |
| |||
|
|
|
| ||
|
|
|
|
|
|
Spinup |
| — | — | 2.8 (peak) | |
|
|
|
|
| |
Idle |
| 7.5 | 0.482 | 0.424 | |
|
|
|
| ||
Idle (with offline activity) [2] | 9.3 | 0.587 | 0.53 | ||
Operating (40% r/w, 40% seek, 20% inop.) | 12.1 | 0.638 | 0.739 | ||
|
|
|
|
| |
Seeking |
| 12.5 | 0.412 | 0.87 | |
|
|
|
| ||
Standby/Sleep | 2.0 | 0.367 | 0.014 | ||
|
|
|
|
|
|
[1]NCQ may not be enabled during power measurements.
[2]During periods of drive idle, some offline activity may occur according to the S.M.A.R.T. specification, which may increase acoustic and power to operational levels.
8 | Barracuda 7200.7 Serial ATA Product Manual, Rev. N |