EPROBDEV | The robot has a problem with |
| handling the device |
ECOORDINATE | One or more coordinates are wrong |
EAREAEMPTY | Area that is to be ejected is already |
| empty. |
EBARCODE | Barcode read error. |
EUPDOWN | Client tried to allocate volsers that |
| are already allocated. |
EDATABASE | There was an error during reading |
| and writing of the database. |
ENOROBOT | The robot is not configured. |
EINVALIDDEV | The device is invalid. |
 DAS 3.01.2 Fixpack
DAS 3.01.2 Fixpack
The following improvements have been made to DAS version
3.01 through the introduction of the Fixpack:
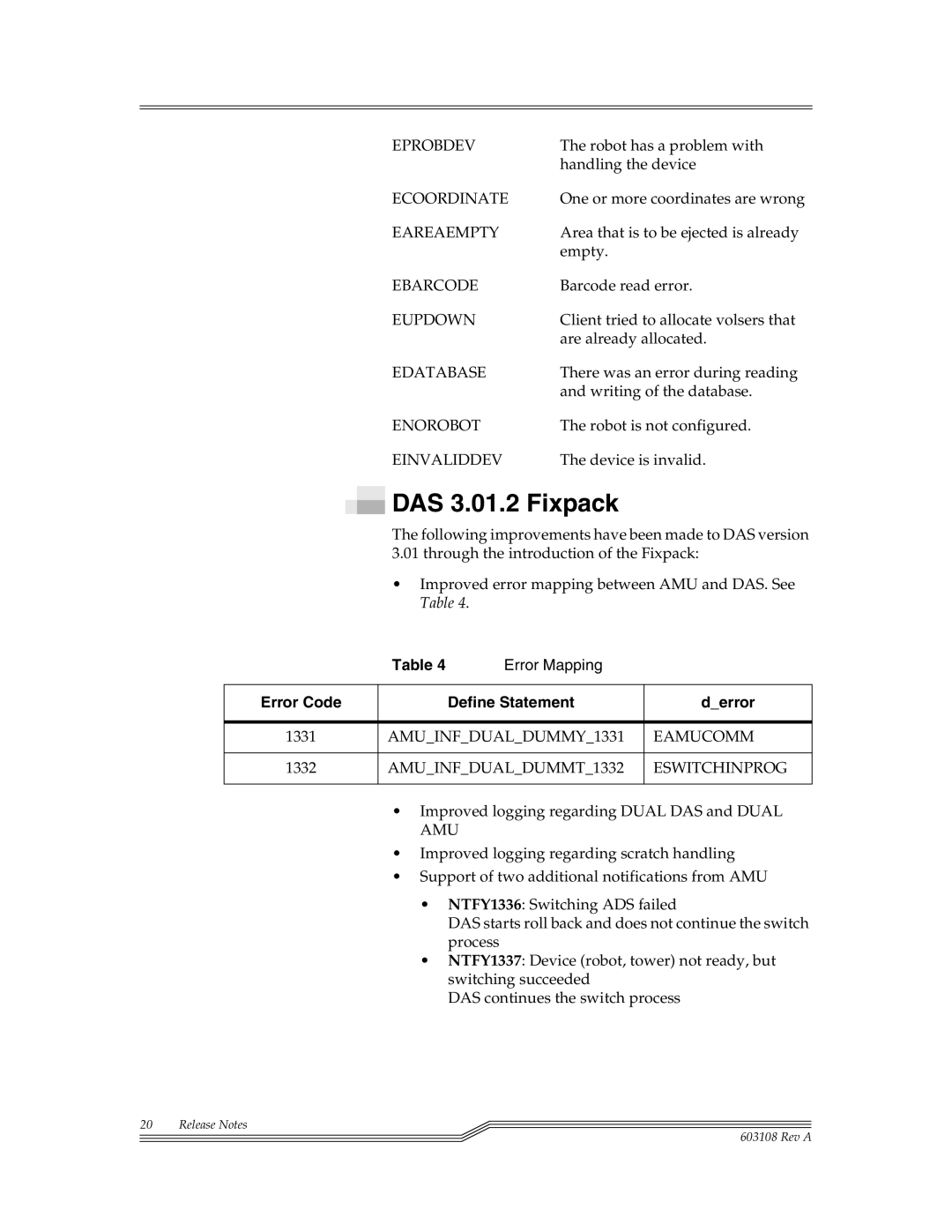
•Improved error mapping between AMU and DAS. See Table 4.
| Table 4 | Error Mapping |
|
|
|
|
|
Error Code |
| Define Statement | d_error |
|
|
| |
1331 | AMU_INF_DUAL_DUMMY_1331 | EAMUCOMM | |
|
|
| |
1332 | AMU_INF_DUAL_DUMMT_1332 | ESWITCHINPROG | |
|
|
|
|
•Improved logging regarding DUAL DAS and DUAL AMU
•Improved logging regarding scratch handling
•Support of two additional notifications from AMU
•NTFY1336: Switching ADS failed
DAS starts roll back and does not continue the switch process
•NTFY1337: Device (robot, tower) not ready, but switching succeeded
DAS continues the switch process
20 Release Notes
603108 Rev A