Switches Sensors
Inside front cover
24/924CE Series Miniature Enclosed Switches
SZL-VL Series Limit Switches
GL Series EN50041/47 Global Limit Switches
14/914CE Series Miniature Enclosed Switches
Introduction
If you need a product not listed in this catalogue
How to use this catalogue
Mounting dimensions
To order these products
Blank
Micro Switch Brand products
Industrial Electromechanical Limit Switches
Standards and Electrical rating
To actuate your limit switch for optimum performance
This symbol
Within the switch
Second Digit Protection against ingress of water
IP Classification
Nema Classification USA
First Digit Protection against ingress of solid objects
EVN2000 Series Global Limit Switches
Roller lever
VL Series General Purpose Compact Limit Switches
Side rotary actuated switches
Roller lever, adjustable
Top roller plunger
Plunger actuated switches
Adjustable rod
VL Series
Coil spring
Wobble actuated switches
Cross roller plunger
Plastic rod, coil spring
Electrical ratings
GLS Series Global Limit Switches
Operating characteristics Actuators
Side rotary
Side rotary adjustable roller
Side rotary adjustable metal rod
GLA EN Standard metal body
Up to 10 million
GLA EN 50041 Standard metal body
Wobble, coil actuator Wobble, cat whisker
Coil wobble head, stainless steel spring actuator
Wobble, coil actuator
Side rotary adjustable
Side rotary adjustable, metal rod
GLC EN 50047 Standard metal body
Metal roller/metal lever
See GLC section for dimension illustrations
GLE EN 50047 Compatible 3 conduit Metal standard body
Plastic roller/metal lever
Offset side rotary roller
Side rotary adjustable metal rod Top roller lever
Electrical rating/contact SL1
SL1 Series
Top roller plunger, parallel
Operating force max.
Mm 0.158
Top roller plunger, long, perpendicular
92 N 0.88 lb
Mm 0.079
Connection
Pretravel PT
Overtravel OT
Contact/Rating
Top pin plunger, panel mounted
Top pin plunger, boot seal
Adjustable plunger
Top roller plunger, parallel, boot seal
Rotary motion
14CE/914CE Series Plunger actuated switches
Top roller plunger, perpendicular, boot seal
Wobble Spring wire
924CE
Europe
Top pin plunger, boot sealed
24CE/924CE Series
North America/Global
Top roller plunger, perpendicular, boot sealed
Blank
Conduit
LS Series
Lever
LS Series Side rotary actuated switches
Fixed length lever Adjustable roller lever
Overtravel min. OT Differential travel max. DT Standard
Side rotary, yoke lever, maintained contact
No lever
Spdt contact
Maintained contact
Overtravel min. OT 35 mm 0.25
LS Series Plunger actuated switches
Top pin plunger Side pin plunger
Side roller plunger
Operating force max. 39 N 5 oz Pretravel max. PT
Steel wire
Flexible cable
Spring rod
Approvals Termination
BF Series Plastic
Type -BW3
Top roller arm, adjustable, one way Coil spring
Spring wire
Low force rod Plastic
BZE/DTE Series
Top pin plunger Top roller plunger, parallel
E6/V6
Momentary contact
Roller
Roller arm, adjustable
Operating temperature Standard
BZE/DTE Series E6/V6 Momentary contact
Wobble, coil spring
One way roller lever Manual palm button
Rod lever
Operating Force max. of With boot seal
BZE/DTE Series E6/V6 Maintained contact reset switches
Switching
IP50 Standard
E7 Metal standard enclosed switch
Top roller lever, boot seal
With boot seal IP65 Sealed
Operating position OP
Series High Capacity Enclosed Switches
2RQ9
One way roller lever
Field adjustable roller plunger
Ring actuator seal
67 N 1.5 lb
With boot seals on roller arm and plunger
Manual palm button Top pin plunger
79 N 1.75 lb
With boot seals on wobble stick and plunger
Dc Volts
Hdls Series Heavy Duty Limit Switches
Ac Volts
Vac Make Break
Performance
Environmental
Seal
Head orientation
Hdls Series Side rotary actuated switches
Side rotary, momentary action
Actuation direction
Side rotary, additional circuitry/ action
Top plungers, momentary action
Hdls Series
Side roller plunger
Side pin plunger
Cable
Plastic rod
Low differential travel
For side rotary
Pages 69-71 for details
Standard
Side plungers
Sequential
Top plungers
Centre neutral
Overtravel 83 mm 0.19 in min Operating point 33 mm ± 0,76
Stainless steel
Low Torque
Blank
Atex EExd Category II
Explosion proof switches
Division
Differential travel DT
14CE100 Series
5mm 0.020
GXE Series Explosion Proof Limit Switches
GXE Series
Side rotary roller lever
EX Series Standard Explosion Proof Switches
Roller material
DPDT, Preleaded with 0,91 m 3 ft leadwire
Conduit openings
Sealing Nema Class 1 Group B
Overtravel plunger actuated switches
EX Series
Cross roller lever, rotated
11,1 N 2.5 lb
Manually actuated
Electrical rating D
77 mm 0.109
Analog position sensing specifications Electrical rating G
CX Series Weather Sealed Explosion Proof Switches
Analog output, 4 mA to 20 mA
Bronze housing for use in corrosive environments
Short housing Standard housing
Basic Switch Type Pretravel max
Silver Electrical rating C Gold
Pilot duty 600 Vac, 720 VA Amps at 0.35 Power Factor
IP67, Nema 1, 3, 4, 6
BX only
M 2.5 in lb
Top rotary
M 4.0 in lb
Pretravel max. PT Overtravel min. OT
Operating point 65,66 mm to 72,01 mm To 2.835
LSX/BX Series Plunger actuated switches
Top pin plunger, adjustable
Top pin plunger Top roller plunger
Operating force max. 26,69 N 6 lb Pretravel max. PT
Operating temperature To 93 C
Cat whisker
Blank
Levers
Specification unless stated otherwise
Not all levers are compatible with all switches
To 3.5
Offset fixed lever Adjustable rod, nylon roller
Adjustable lever
Yoke lever
Stainless steel levers
Standard, PCB Terminal, Dpdt Solder/Plug-In Terminal, Dpdt
Series Power Relay
LED Indicator
MY2 Series
Solder/Plug-In Terminal, 4PDT
LED Indicator/Diode Protection
MY4 Series
Standard, PCB Terminal, 4PDT
Diode Protection
LY2 Series
Standard, PCB Terminal, Dpdt
LY4 Series
Type
MY2 Series Socket LY2 Series Socket
MY4 Series Socket
LY4 Series Socket
Protective Guarding
Electromechanical Safety Switches
Cable Pull Switches
To 85 C -13 F to 185 F
GKM Series Global Miniature Safety Key Operated Switch
IP66/67, EN 60529, Nema 1, 12
Gold plated
Side exit cable
Side exit M12 dc micro-change connector
Bottom exit M12 dc micro-change connector
Dual exit M12 dc micro-change connector
Slow action contacts 1NC/1NO BBM
Limit Switch
Low Energy Switching
GSS Series
Rotated 90 either direction from center
Rotated 90 to the left Rotated 90 to the right From center
GSC Metal body
GSD Plastic body
Rotated 90 to the right from center
Safety 3 Conduit Metal Standard
Rotated 90 to the left from center
Slow action contacts 3NC/1NO
GK Series Dual Entry Key Operated Safety Interlock Switch
IP 67, NEMA/UL type 1, 4, 12,13
Opening to front and top Opening to right and top
Single LED indicator
Double LED indicator
Head orientation
GKL/GKR Series
NPT buna-n seals
GKL/GKR Series
Opening to front and top
Left
Opening to left and top Left
Opening to right and top Right
Mm buna-n seals
Spring-loaded key left/right
Spring-loaded key up/down
1CPS indicator Light Code 2CPS indicator Light Code
CPS Series Cable Pull Safety Switch
20 mm
Contact Indicator Reference
CPS Series
NPT
Contact Contact Block Indicator Mounting
Contact Contact Block Indicator Reference Mounting
Cable maintained both sides
Blank
Linear and Rotary Position
Water resistant
Linear Rotary Position Transducers
Lfii Series Longfellow II linear position transducer
Water resistant Binder
Lfii Metric Series Longfellow II linear position transducer
Standard Binder
Standard DIN
Shaft
Connector, DIN
DR Series Durastar rodless linear position transducer
75 Vdc
Electrical Travel
SLF Series Short Longfellow linear position transducer
± 0.1 % Linearity
± 1.0 % Linearity
Shaft Ø
SLF Metric Series
00508 mm 0.0002
LT Series
To 80 C -40 F to 176 F
Standard 28,35 g 1.0 oz Water resistant 340,19 g 12.0 oz
7500
MLT Series Linear position transducer, 3/8 in Diameter
0127 mm 0.0005
MLT005
54,87 mm 2.16
Aqlt Series
Aqmlt Series
Sealing IP68 Termination Cable
Servo mount
M22 Series Rotary position transducer
Threaded bushing mount
Ball bearings
WPM Series Rotary position transducer, servo mount
60 Vdc
01 %
Metric
Torque Watch Guages
Series Low range Mid range 003 0.60 oz
15.0 200.0 oz
Rotation
Clarostat Rotary Position Transducers
TH100 Series
KOhm Resistance
Series, Precision potentiometer
Flatted Shaft
Slotted Shaft
Series, Commercial potentiometer
14,27
50,8 27,78 025 14,27
27,78 22,23
875
Resistance Tolerance Reference
RV4 MIL Series potentiometer
Standard Bushing
875 in 22,23 mm shaft length
110
Audio taper
Series potentiometer
Standard Bushing, 2.0 in 50,8 mm shaft length
Linear taper
Series , Mechanical
Encoders
Series
Slotted Optical Switches
Electrical Parameter MOUNTING/SENSOR Reference
Slotted Optical Switches 860/870 Series
MOUNTING/SENSOR Reference
To 80 C -40 F to 176 F
800W Series, Wide gap
50 mA
100 mW
116
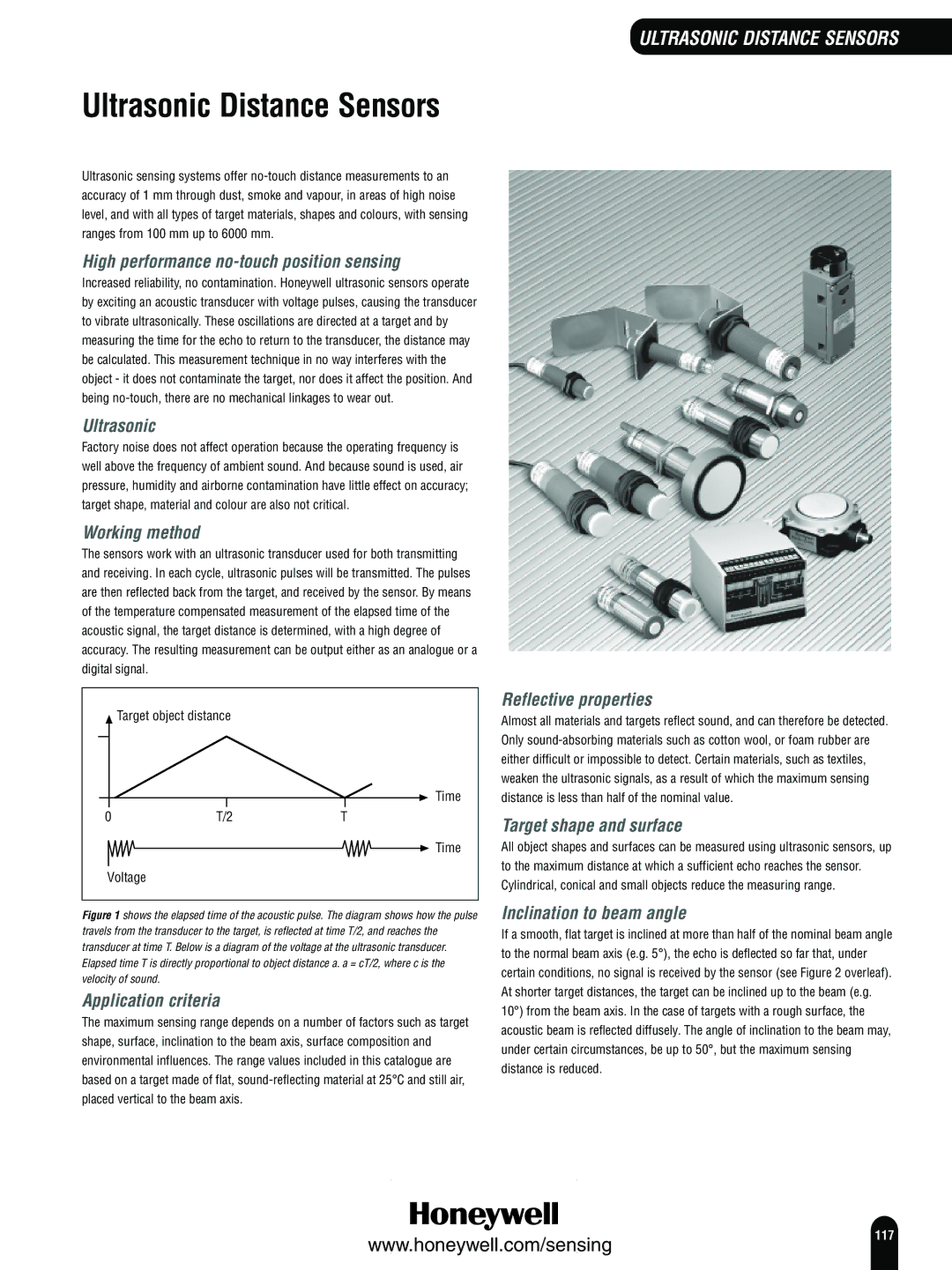
Ultrasonic Distance Sensors
Synchronisation
Environmental influences
Repeatability
Mutual interference
Analogue voltage output, 0-10
Adjustable switching output
Series Thru scan, 2 part
Switching outputs
Series
Analogue output 0-10 volts
Voltage output, 0-10 Switching outputs PNP
RS232 Interface
Switching RS232 interface
Switching Adjustable switching outputs PNP no
Series Piece
Teach
Adjustable switching outputs
Beam Deflectors
Accessories
Power supply
M12 female, 7 pin 942 Series
M12 Connectors
Use with Series 940 Housing Plastic
Supplied with 946 Series
946 IP65
Software
Programming adaptor for
Series Module
High Purity versions
Pressure Sensors
Stainless Steel versions
Termination type
Port style Flush Diaphragm Output type MV to 100 mV
Port style
Approval Supply voltage
Operating temperature range
BX Series
Output 1 kHz to 6 kHz To 85 C -40 F to 185 F
Output 1 Vdc to 6 Vdc To 100 C -67 F to 212 F
EC350BS6PC
G1/4 in 19 BSP Connector
Eclipse Series
Model Cable
MediaMate Series
CE Approval
SA Series
UL Approval
Sealed Gauge
18 NPT Connector
Vdc to 4.5 Vdc Ratiometric Output 1/4 in 18 NPT Connector
Packard Metri-Pack Connector
19mm Series
MA or 10 Vdc
Uncompensated Series Pin Connector
13mm Series
18 NPT 50,0 mm 2.0 in Nomex ribbon cable
Absolute, Sealed, and Gauge
SPT Series
4mA to 20 mA Output 609 m 2 ft 4-Conductor shielded pairs
UNF Vdc to 5.0 Vdc Output
F1 Series
S1 Series
VF 1/4 in Female Face Seal Bendix Male Connector
VM 1/4 in Male Face Seal Bendix Male Connector
VS 1/4 in Male Face Seal, Swivel Bendix Male Connector
TLD Series
Flow-through/Output Signal 4 mA to 20 mA
Flow-through/Output Signal 0 Vdc to 5.0 Vdc
Single Port/Output Signal 4 mA to 20 mA
VS 1/4 in male face seal, swivel
TLD Series
VF 1/4 in female face seal
VM 1/4 in male face seal
Bonded Element Series
Pushbuttons, Keyswitches and Indicators
Limit and Enclosed Switches
Basic Switches
Environment Sealed Switches and Sensors
Thermal Products
Temperature Sensors
Toggle and Rocker Switches
Resolvers
USA
Mail info.sc@honeywell.com
Info.sc@honeywell.com