SAT measurement
Command Byte Menu
À
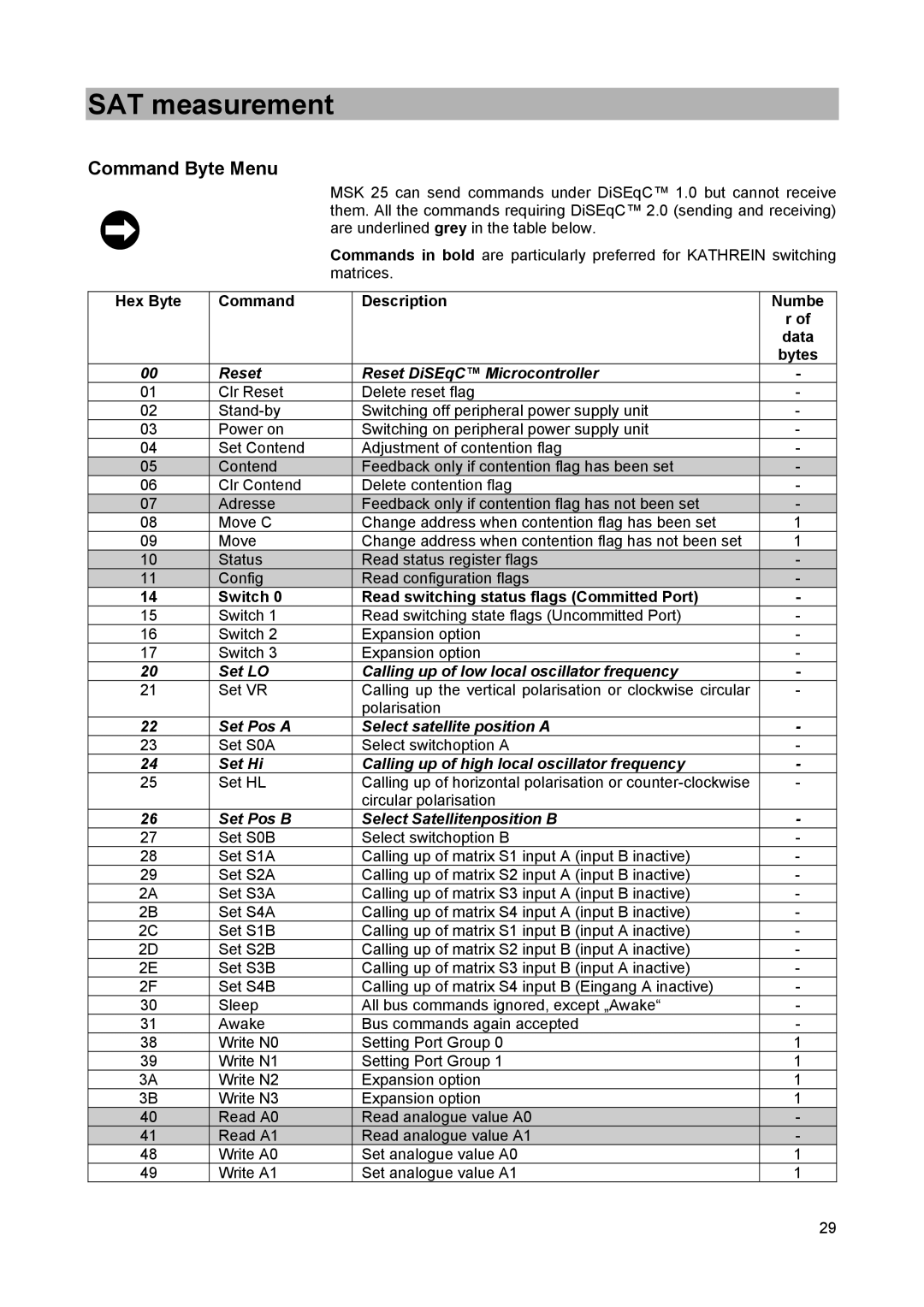
MSK 25 can send commands under DiSEqC™ 1.0 but cannot receive them. All the commands requiring DiSEqC™ 2.0 (sending and receiving) are underlined grey in the table below.
Commands in bold are particularly preferred for KATHREIN switching matrices.
Hex Byte | Command | Description | Numbe |
|
|
| r of |
|
|
| data |
|
|
| bytes |
00 | Reset | Reset DiSEqC™ Microcontroller | - |
01 | Clr Reset | Delete reset flag | - |
02 | Switching off peripheral power supply unit | - | |
03 | Power on | Switching on peripheral power supply unit | - |
04 | Set Contend | Adjustment of contention flag | - |
05 | Contend | Feedback only if contention flag has been set | - |
06 | Clr Contend | Delete contention flag | - |
07 | Adresse | Feedback only if contention flag has not been set | - |
08 | Move C | Change address when contention flag has been set | 1 |
09 | Move | Change address when contention flag has not been set | 1 |
10 | Status | Read status register flags | - |
11 | Config | Read configuration flags | - |
14 | Switch 0 | Read switching status flags (Committed Port) | - |
15 | Switch 1 | Read switching state flags (Uncommitted Port) | - |
16 | Switch 2 | Expansion option | - |
17 | Switch 3 | Expansion option | - |
20 | Set LO | Calling up of low local oscillator frequency | - |
21 | Set VR | Calling up the vertical polarisation or clockwise circular | - |
|
| polarisation |
|
22 | Set Pos A | Select satellite position A | - |
23 | Set S0A | Select switchoption A | - |
24 | Set Hi | Calling up of high local oscillator frequency | - |
25 | Set HL | Calling up of horizontal polarisation or | - |
|
| circular polarisation |
|
26 | Set Pos B | Select Satellitenposition B | - |
27 | Set S0B | Select switchoption B | - |
28 | Set S1A | Calling up of matrix S1 input A (input B inactive) | - |
29 | Set S2A | Calling up of matrix S2 input A (input B inactive) | - |
2A | Set S3A | Calling up of matrix S3 input A (input B inactive) | - |
2B | Set S4A | Calling up of matrix S4 input A (input B inactive) | - |
2C | Set S1B | Calling up of matrix S1 input B (input A inactive) | - |
2D | Set S2B | Calling up of matrix S2 input B (input A inactive) | - |
2E | Set S3B | Calling up of matrix S3 input B (input A inactive) | - |
2F | Set S4B | Calling up of matrix S4 input B (Eingang A inactive) | - |
30 | Sleep | All bus commands ignored, except „Awake“ | - |
31 | Awake | Bus commands again accepted | - |
38 | Write N0 | Setting Port Group 0 | 1 |
39 | Write N1 | Setting Port Group 1 | 1 |
3A | Write N2 | Expansion option | 1 |
3B | Write N3 | Expansion option | 1 |
40 | Read A0 | Read analogue value A0 | - |
41 | Read A1 | Read analogue value A1 | - |
48 | Write A0 | Set analogue value A0 | 1 |
49 | Write A1 | Set analogue value A1 | 1 |
29