8.Appendix B
Pioneer Server Information Packet
Name
Data Type
Description
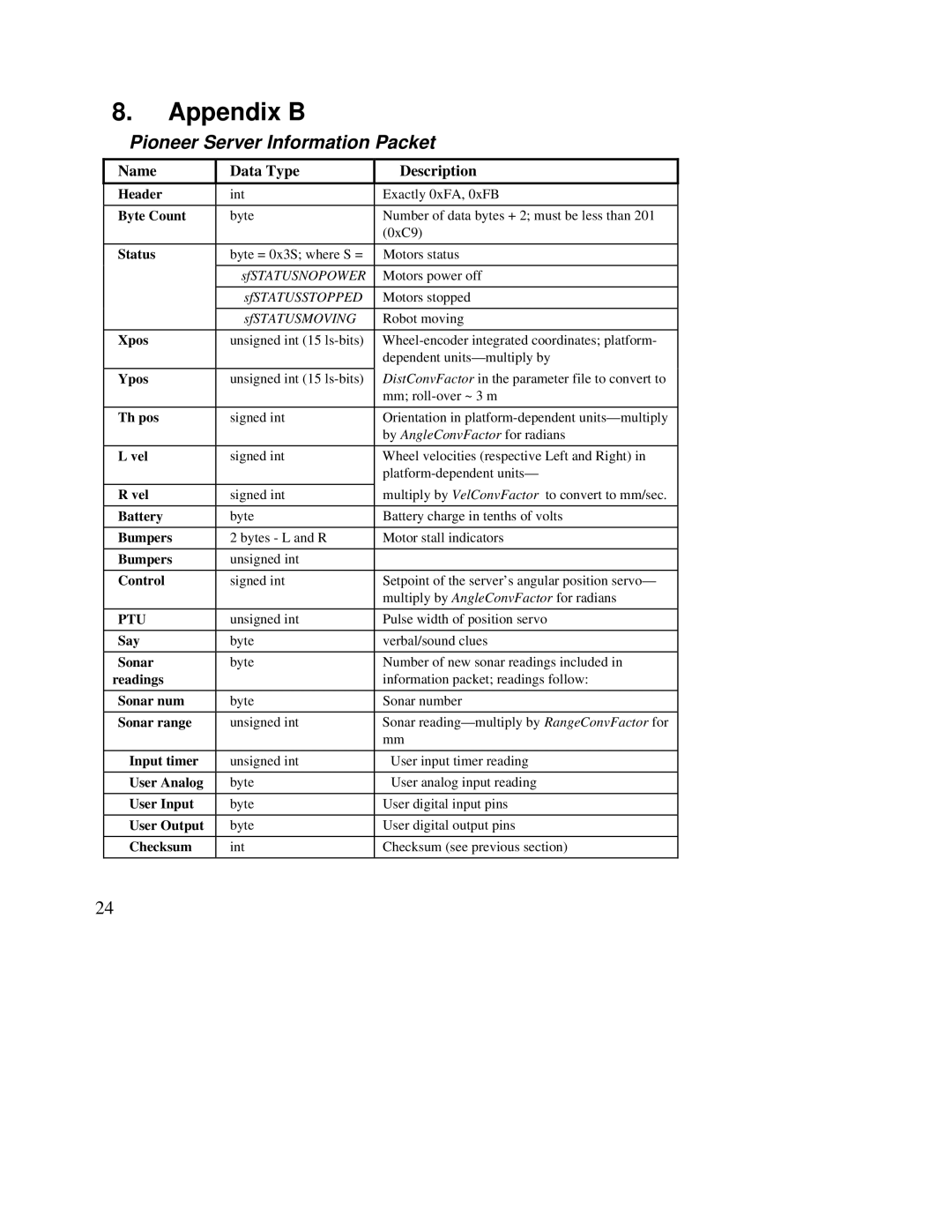
Header | int | Exactly 0xFA, 0xFB |
|
|
|
Byte Count | byte | Number of data bytes + 2; must be less than 201 |
|
| (0xC9) |
|
|
|
Status | byte = 0x3S; where S = | Motors status |
|
|
|
| sfSTATUSNOPOWER | Motors power off |
|
|
|
| sfSTATUSSTOPPED | Motors stopped |
|
|
|
| sfSTATUSMOVING | Robot moving |
|
|
|
Xpos | unsigned int (15 | |
|
| dependent |
|
|
|
Ypos | unsigned int (15 | DistConvFactor in the parameter file to convert to |
|
| mm; |
|
|
|
Th pos | signed int | Orientation in |
|
| by AngleConvFactor for radians |
|
|
|
L vel | signed int | Wheel velocities (respective Left and Right) in |
|
| |
|
|
|
R vel | signed int | multiply by VelConvFactor to convert to mm/sec. |
|
|
|
Battery | byte | Battery charge in tenths of volts |
|
|
|
Bumpers | 2 bytes - L and R | Motor stall indicators |
|
|
|
Bumpers | unsigned int |
|
|
|
|
Control | signed int | Setpoint of the server’s angular position servo— |
|
| multiply by AngleConvFactor for radians |
|
|
|
PTU | unsigned int | Pulse width of position servo |
|
|
|
Say | byte | verbal/sound clues |
|
|
|
Sonar | byte | Number of new sonar readings included in |
readings |
| information packet; readings follow: |
|
|
|
Sonar num | byte | Sonar number |
|
|
|
Sonar range | unsigned int | Sonar |
|
| mm |
|
|
|
Input timer | unsigned int | User input timer reading |
|
|
|
User Analog | byte | User analog input reading |
|
|
|
User Input | byte | User digital input pins |
|
|
|
User Output | byte | User digital output pins |
|
|
|
Checksum | int | Checksum (see previous section) |
|
|
|
24