Using Other Controllers
ARobot’s controller board is designed to accept the Basic Stamp II controller chip made by Parallax (www.parallaxinc.com). Parallax makes other Basic Stamp II compatible controllers which offer more memory and greater speed. Other manufacturers also make controllers that are compatible with the Ba- sic Stamp II and most of them should work fine with ARobot©s controller board.
It is possible to remove the Basic Stamp II and use a different type of
Cabling between ARobot’s controller and another controller
You have two cabling choices: #1 Cable from the Basic Stamp II socket to the new controller, #2 Cable from the expansion port to the new controller. See the expansion port connector pinout and the Basic Stamp II pinout in the schematic for pin numbers and signal usage. Cabling to the Basic Stamp II socket will allow access to the
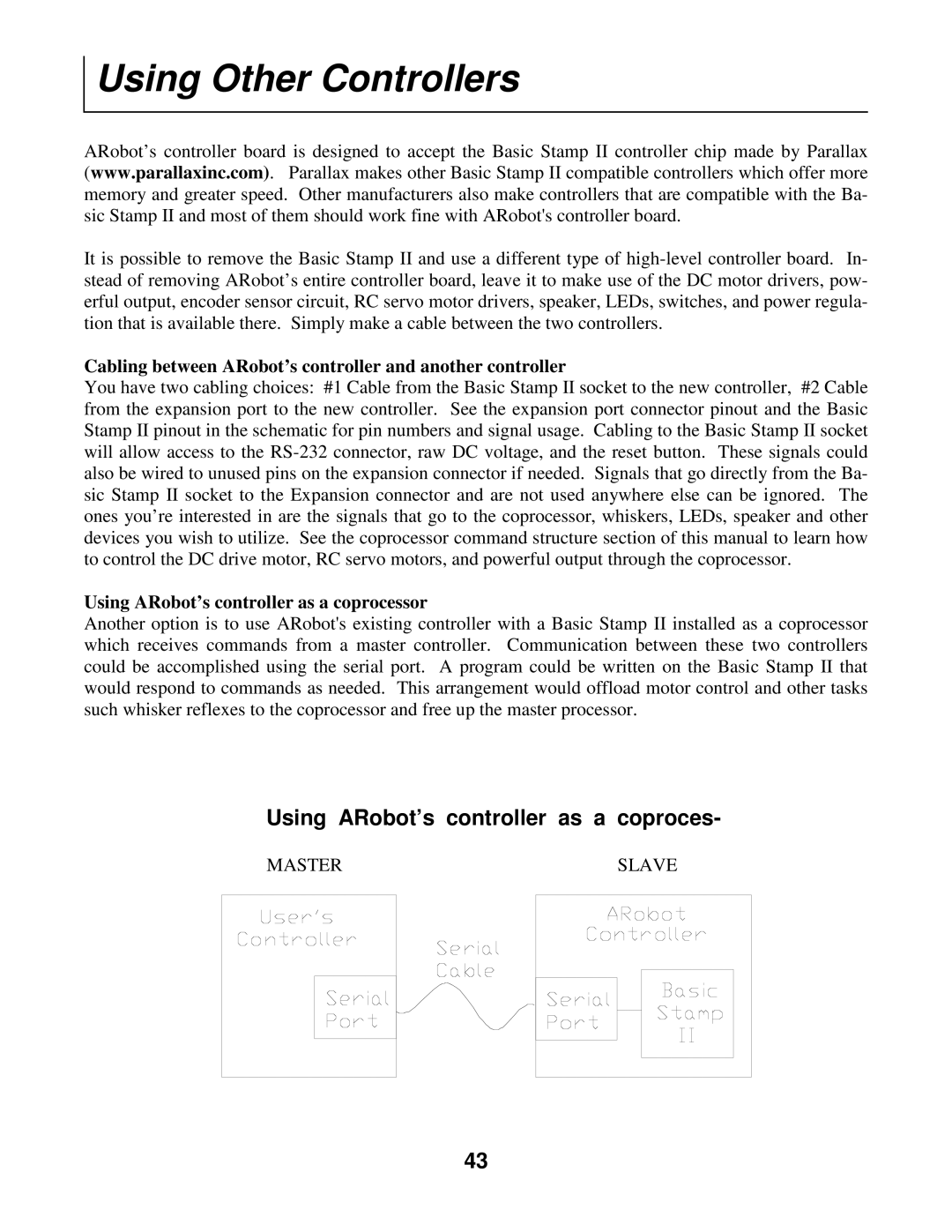
Using ARobot’s controller as a coprocessor
Another option is to use ARobot©s existing controller with a Basic Stamp II installed as a coprocessor which receives commands from a master controller. Communication between these two controllers could be accomplished using the serial port. A program could be written on the Basic Stamp II that would respond to commands as needed. This arrangement would offload motor control and other tasks such whisker reflexes to the coprocessor and free up the master processor.
Using ARobot’s controller as a coproces-
MASTER |
SLAVE |
43