RC Servo Motor Connectors (J2-J5)
Usage: Connects controller to RC servo motors.
J2 is used for the steering motor.
J3, J4, J5 are user defined.
Controlled by the coprocessor
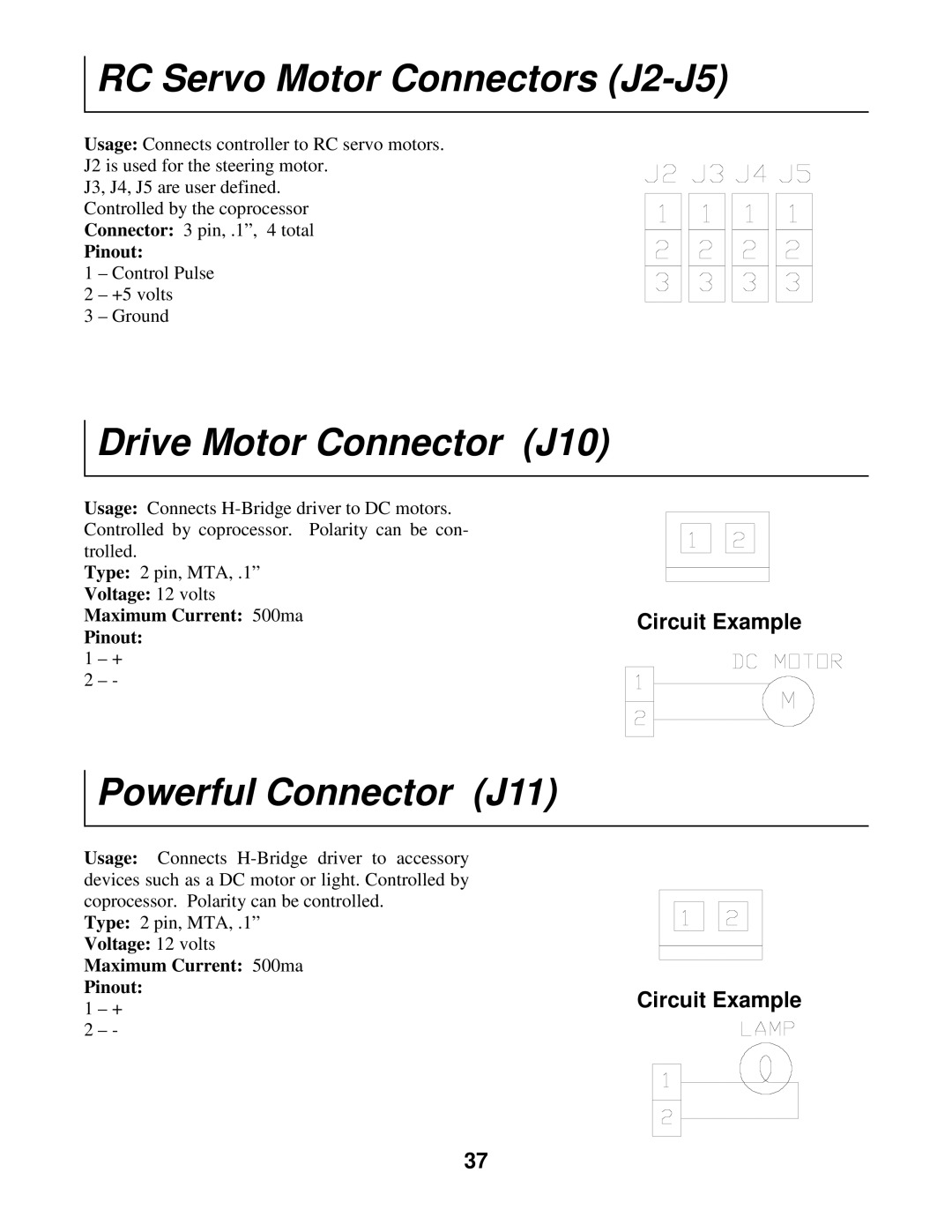
Connector: 3 pin, .1”, 4 total
Pinout:
1 – Control Pulse
2 – +5 volts
3 – Ground
Drive Motor Connector (J10)
Usage: Connects
Type: 2 pin, MTA, .1”
Voltage: 12 volts
Maximum Current: 500ma
Pinout:
1 – +
2 – -
Circuit Example
Powerful Connector (J11)
Usage: Connects
Type: 2 pin, MTA, .1”
Voltage: 12 volts
Maximum Current: 500ma
Pinout:
1 – +
2 – -
Circuit Example
37