Circuit Description
12.1.3 Motor Driver
A motor drive circuit is decided when selecting a driver IC. (Supplied by vendor) ML1610 uses the motor driver IC of AN44060. However, the sensing resistance Rs value and the Vreference resistance value are variable according to the motor drive current value.
12.1.4 LSU Controller
The laser scanning unit controller (LSUC) of Jupiter4E is a block for interface between PVC block and LSU.
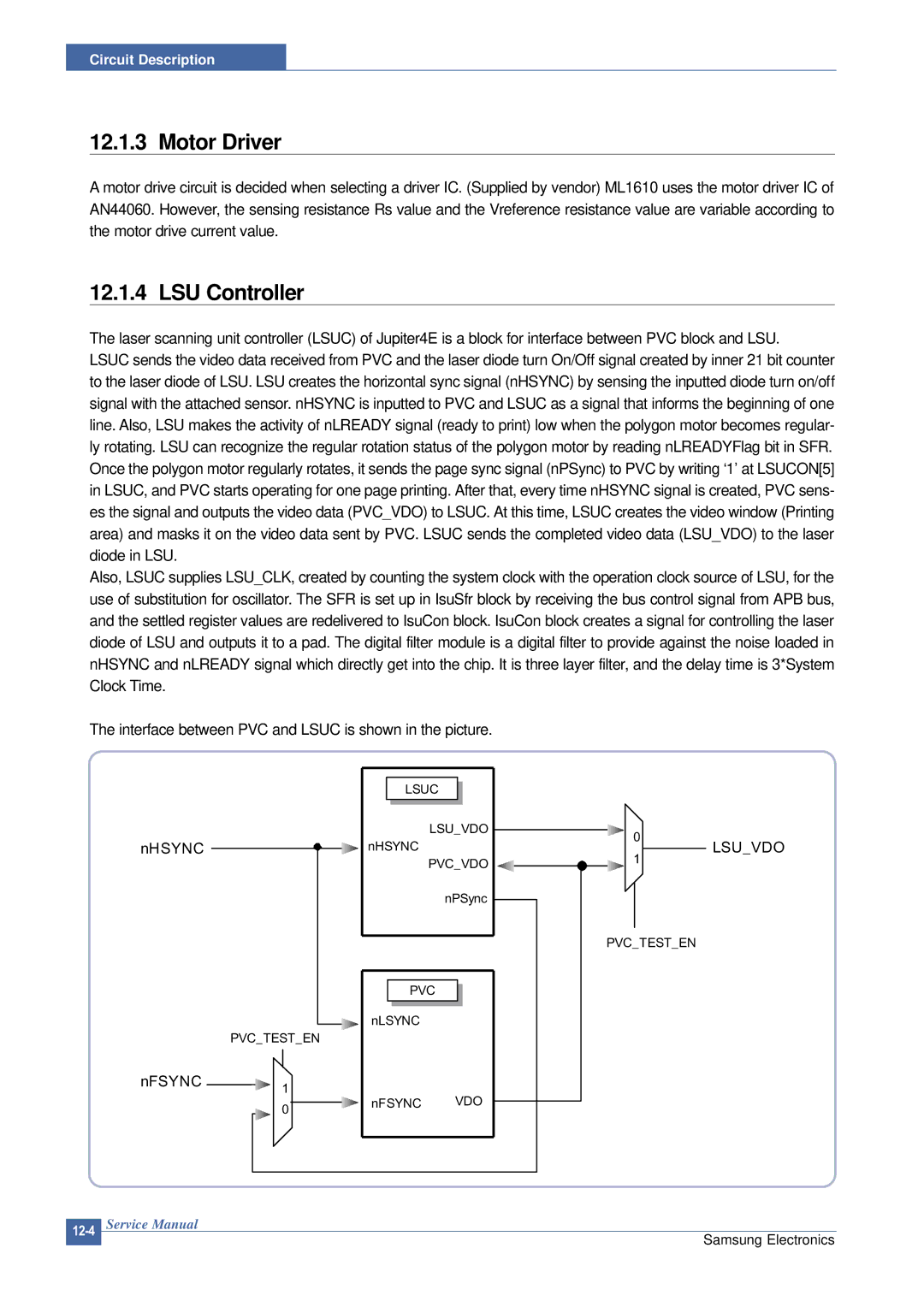
LSUC sends the video data received from PVC and the laser diode turn On/Off signal created by inner 21 bit counter to the laser diode of LSU. LSU creates the horizontal sync signal (nHSYNC) by sensing the inputted diode turn on/off signal with the attached sensor. nHSYNC is inputted to PVC and LSUC as a signal that informs the beginning of one line. Also, LSU makes the activity of nLREADY signal (ready to print) low when the polygon motor becomes regular- ly rotating. LSU can recognize the regular rotation status of the polygon motor by reading nLREADYFlag bit in SFR. Once the polygon motor regularly rotates, it sends the page sync signal (nPSync) to PVC by writing ‘1’ at LSUCON[5] in LSUC, and PVC starts operating for one page printing. After that, every time nHSYNC signal is created, PVC sens- es the signal and outputs the video data (PVC_VDO) to LSUC. At this time, LSUC creates the video window (Printing area) and masks it on the video data sent by PVC. LSUC sends the completed video data (LSU_VDO) to the laser diode in LSU.
Also, LSUC supplies LSU_CLK, created by counting the system clock with the operation clock source of LSU, for the use of substitution for oscillator. The SFR is set up in IsuSfr block by receiving the bus control signal from APB bus, and the settled register values are redelivered to IsuCon block. IsuCon block creates a signal for controlling the laser diode of LSU and outputs it to a pad. The digital filter module is a digital filter to provide against the noise loaded in nHSYNC and nLREADY signal which directly get into the chip. It is three layer filter, and the delay time is 3*System Clock Time.
The interface between PVC and LSUC is shown in the picture.
LSUC |
|
LSU_VDO | 0 |
|
nHSYNC |
| nHSYNC |
| LSU_VDO |
|
|
| PVC_VDO | 1 |
|
|
|
| |
|
|
| nPSync |
|
|
|
|
| PVC_TEST_EN |
|
| PVC |
| |
|
| nLSYNC |
|
|
| PVC_TEST_EN |
|
|
|
nFSYNC | 1 |
|
|
|
|
| VDO |
| |
| 0 | nFSYNC |
| |
|
|
|
| |
Samsung Electronics